[PX4 개발자] Ubuntu 18.04에서 SITL 수행
앞서 PX4 펌웨어를 컴파일해보았다.
[PX4 개발자] Ubuntu 18.04에 ROS(Melodic)/Gazebo 설치하기
The supported/tested Linux OS versions for PX4 development are Ubuntu Linux LTS (opens new window) 18.04 (Bionic Beaver) and 20.04 (Focal Fossa). These allow you to build for the most PX4 targets (N..
swiftcam.tistory.com
[PX4 개발자] Ubuntu 18.04에서 PX4 Firmware 컴파일
우분투에서 PX4 Firm웨어를 컴파일하기 위해서는 먼저 ROS, catkin_tools등 필요한 개발환경이 구축되어야 한다. PX4 개발 환경을 구축하는 방법은 아래 포스팅을 확인하기 바란다. swiftcam.tistory.com/267 [P
swiftcam.tistory.com
풤웨어가 정상적으로 컴파일된다면, 하드웨어가 없을 경우 시뮬레이션 환경에서 컴파일된 펌웨어를 사용하여 동작을 확인할 수 있다.
먼저 시뮬레이션 환경에서 펌웨어를 구동하려면 SITL 환경의 펌웨어를 동일한 방법으로 컴파일해주어야 한다.
$ make px4_fmu_default gazebo make px4_sitl_default gazebo
컴파일 옵션에 gazebo가 들어가 있으므로 컴파일이 정상적으로 완료되면 gazebo가 실행되면서 IRIS 드론이 나타난다.
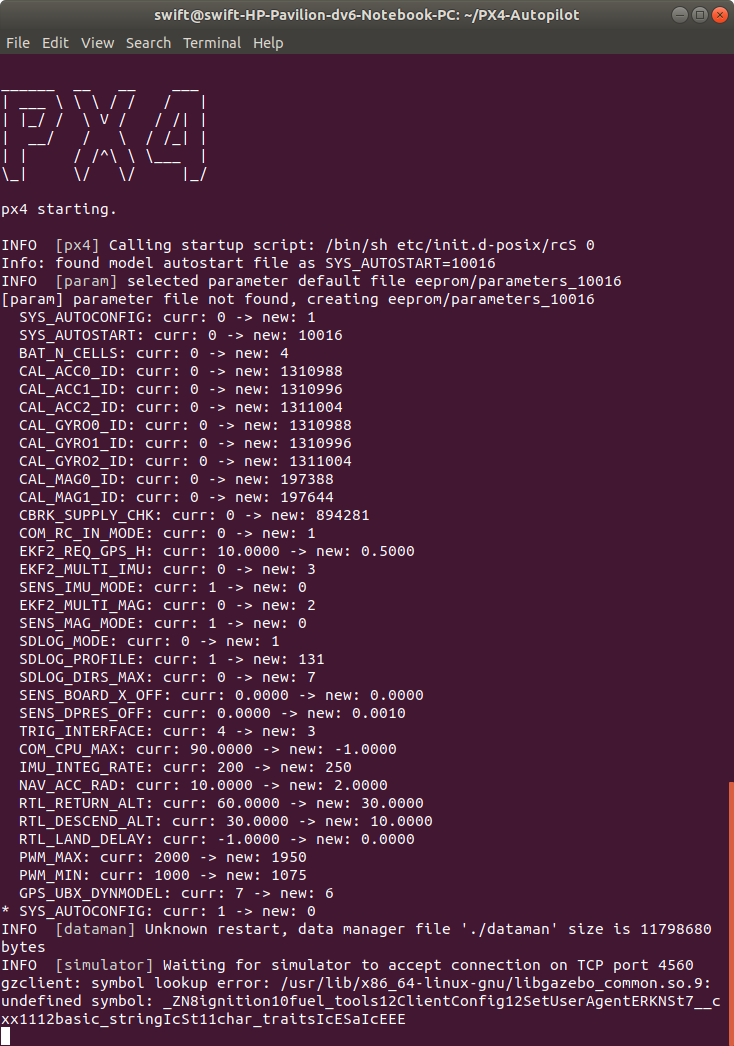
본인이 포스팅한 절차대로 컴파일하고 난후 gazebo가 바로 실행되지 않고 아래와 같은 에러 메시지가 나타났다.
|
INFO [simulator] Waiting for simulator to accept connection on TCP port 4560 undefined symbol: _ZN8ignition10fuel_tools12ClientConfig12SetUserAgentERKNSt7__cxx1112basic_stringIcSt11char_traitsIcESaIcEEE
|
구글링하여 에러 메시지를 확인해보이 아래와 같은 라이브러를 설치하여 해결할 수 있다.
|
$ sudo apt upgrade libignition-math2 |
이전에 컴파일된 소스들을 클린하고 다시 펌웨어를 컴파일한다.
$ make clean
$ make px4_fmu_default gazebo make px4_sitl_default gazebo

컴파일 결과 에러없이 정상적으로 빌드가 완료되고, gazebo도 정상적으로 실행됨을 확인할 수 있다.
