개발환경
- Ubuntu 20.04
- ROS noetic
- PX4_SITL
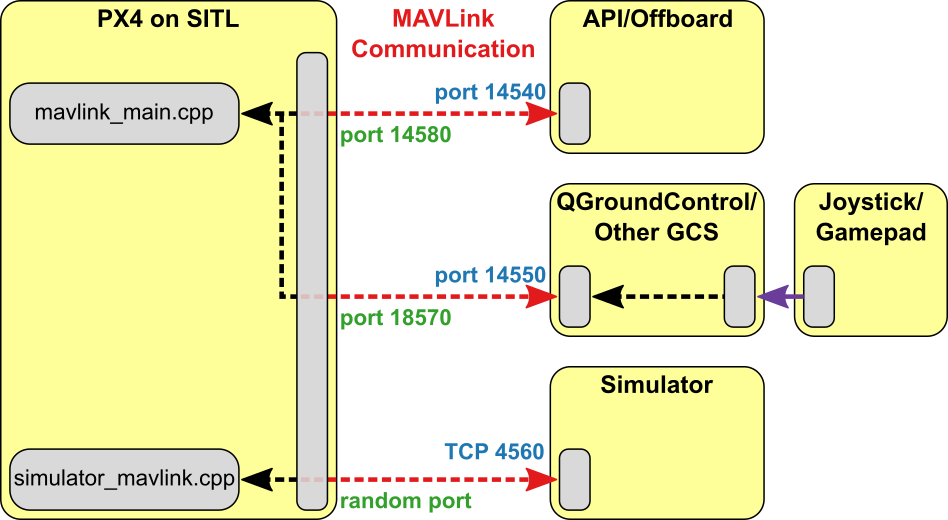
PX4와 Gazebo, MAVLink 연동 다이어그램
mavros 설치
swift@swift-System-Product-Name:~/catkin_ws/src$ sudo apt-get install ros-noetic-mavros
[sudo] password for swift:
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following package was automatically installed and is no longer required:
libllvm11
Use 'sudo apt autoremove' to remove it.
The following additional packages will be installed:
geographiclib-tools libgeographic-dev libgeographic19 ros-noetic-geographic-msgs ros-noetic-libmavconn
ros-noetic-mavlink ros-noetic-mavros-msgs ros-noetic-uuid-msgs
Suggested packages:
geographiclib-doc
The following NEW packages will be installed:
geographiclib-tools libgeographic-dev libgeographic19 ros-noetic-geographic-msgs ros-noetic-libmavconn
ros-noetic-mavlink ros-noetic-mavros ros-noetic-mavros-msgs ros-noetic-uuid-msgs
0 upgraded, 9 newly installed, 0 to remove and 0 not upgraded.
Need to get 3,064 kB of archives.
After this operation, 34.6 MB of additional disk space will be used.
Do you want to continue? [Y/n] y
Get:1 http://packages.ros.org/ros/ubuntu focal/main amd64 ros-noetic-uuid-msgs amd64 1.0.6-1focal.20210423.224434 [11.9 kB]
Get:2 http://kr.archive.ubuntu.com/ubuntu focal/universe amd64 libgeographic19 amd64 1.50.1-1build1 [243 kB]
Get:3 http://packages.ros.org/ros/ubuntu focal/main amd64 ros-noetic-geographic-msgs amd64 0.5.6-1focal.20210605.000032 [72.0 kB]
Get:4 http://packages.ros.org/ros/ubuntu focal/main amd64 ros-noetic-mavlink amd64 2021.8.8-1focal.20210809.125654 [806 kB]
Get:5 http://kr.archive.ubuntu.com/ubuntu focal/universe amd64 geographiclib-tools amd64 1.50.1-1build1 [179 kB]
Get:6 http://kr.archive.ubuntu.com/ubuntu focal/universe amd64 libgeographic-dev amd64 1.50.1-1build1 [392 kB]
Get:7 http://packages.ros.org/ros/ubuntu focal/main amd64 ros-noetic-libmavconn amd64 1.8.0-1focal.20210809.130011 [144 kB]
Get:8 http://packages.ros.org/ros/ubuntu focal/main amd64 ros-noetic-mavros-msgs amd64 1.8.0-1focal.20210727.071620 [334 kB]
Get:9 http://packages.ros.org/ros/ubuntu focal/main amd64 ros-noetic-mavros amd64 1.8.0-1focal.20210809.130558 [882 kB]
Fetched 3,064 kB in 8s (396 kB/s)
Selecting previously unselected package libgeographic19:amd64.
(Reading database ... 285572 files and directories currently installed.)
Preparing to unpack .../0-libgeographic19_1.50.1-1build1_amd64.deb ...
Unpacking libgeographic19:amd64 (1.50.1-1build1) ...
Selecting previously unselected package geographiclib-tools.
Preparing to unpack .../1-geographiclib-tools_1.50.1-1build1_amd64.deb ...
Unpacking geographiclib-tools (1.50.1-1build1) ...
Selecting previously unselected package libgeographic-dev.
Preparing to unpack .../2-libgeographic-dev_1.50.1-1build1_amd64.deb ...
Unpacking libgeographic-dev (1.50.1-1build1) ...
Selecting previously unselected package ros-noetic-uuid-msgs.
Preparing to unpack .../3-ros-noetic-uuid-msgs_1.0.6-1focal.20210423.224434_amd64.deb ...
Unpacking ros-noetic-uuid-msgs (1.0.6-1focal.20210423.224434) ...
Selecting previously unselected package ros-noetic-geographic-msgs.
Preparing to unpack .../4-ros-noetic-geographic-msgs_0.5.6-1focal.20210605.000032_amd64.deb ...
Unpacking ros-noetic-geographic-msgs (0.5.6-1focal.20210605.000032) ...
Selecting previously unselected package ros-noetic-mavlink.
Preparing to unpack .../5-ros-noetic-mavlink_2021.8.8-1focal.20210809.125654_amd64.deb ...
Unpacking ros-noetic-mavlink (2021.8.8-1focal.20210809.125654) ...
Selecting previously unselected package ros-noetic-libmavconn.
Preparing to unpack .../6-ros-noetic-libmavconn_1.8.0-1focal.20210809.130011_amd64.deb ...
Unpacking ros-noetic-libmavconn (1.8.0-1focal.20210809.130011) ...
Selecting previously unselected package ros-noetic-mavros-msgs.
Preparing to unpack .../7-ros-noetic-mavros-msgs_1.8.0-1focal.20210727.071620_amd64.deb ...
Unpacking ros-noetic-mavros-msgs (1.8.0-1focal.20210727.071620) ...
Selecting previously unselected package ros-noetic-mavros.
Preparing to unpack .../8-ros-noetic-mavros_1.8.0-1focal.20210809.130558_amd64.deb ...
Unpacking ros-noetic-mavros (1.8.0-1focal.20210809.130558) ...
Setting up libgeographic19:amd64 (1.50.1-1build1) ...
Setting up ros-noetic-uuid-msgs (1.0.6-1focal.20210423.224434) ...
Setting up ros-noetic-mavlink (2021.8.8-1focal.20210809.125654) ...
Setting up ros-noetic-libmavconn (1.8.0-1focal.20210809.130011) ...
Setting up geographiclib-tools (1.50.1-1build1) ...
Setting up libgeographic-dev (1.50.1-1build1) ...
Setting up ros-noetic-geographic-msgs (0.5.6-1focal.20210605.000032) ...
Setting up ros-noetic-mavros-msgs (1.8.0-1focal.20210727.071620) ...
Setting up ros-noetic-mavros (1.8.0-1focal.20210809.130558) ...
Processing triggers for man-db (2.9.1-1) ...
Processing triggers for libc-bin (2.31-0ubuntu9.2) ...
swift@swift-System-Product-Name:~/catkin_ws/src$ sudo apt-get install ros-noetic-mavros-extras
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following package was automatically installed and is no longer required:
libllvm11
Use 'sudo apt autoremove' to remove it.
The following NEW packages will be installed:
ros-noetic-mavros-extras
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
Need to get 361 kB of archives.
After this operation, 1,953 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros/ubuntu focal/main amd64 ros-noetic-mavros-extras amd64 1.8.0-1focal.20210809.131659 [361 kB]
Fetched 361 kB in 2s (231 kB/s)
Selecting previously unselected package ros-noetic-mavros-extras.
(Reading database ... 288063 files and directories currently installed.)
Preparing to unpack .../ros-noetic-mavros-extras_1.8.0-1focal.20210809.131659_amd64.deb ...
Unpacking ros-noetic-mavros-extras (1.8.0-1focal.20210809.131659) ...
Setting up ros-noetic-mavros-extras (1.8.0-1focal.20210809.131659) ...
GeographicLib 데이터세트를 설치
swift@swift-System-Product-Name:~/Desktop$ wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
--2021-08-29 01:02:06-- https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
Resolving raw.githubusercontent.com (raw.githubusercontent.com)... 185.199.109.133, 185.199.108.133, 185.199.110.133, ...
Connecting to raw.githubusercontent.com (raw.githubusercontent.com)|185.199.109.133|:443... connected.
HTTP request sent, awaiting response... 200 OK
Length: 1244 (1.2K) [text/plain]
Saving to: ‘install_geographiclib_datasets.sh’
install_geographicl 100%[===================>] 1.21K --.-KB/s in 0s
2021-08-29 01:02:07 (24.3 MB/s) - ‘install_geographiclib_datasets.sh’ saved [1244/1244]
swift@swift-System-Product-Name:~/Desktop$ ll
total 16
drwxr-xr-x 2 swift swift 4096 8월 29 01:02 ./
drwxr-xr-x 21 swift swift 4096 8월 29 00:46 ../
-rw-rw-r-- 1 swift swift 1244 8월 29 01:02 install_geographiclib_datasets.sh
-rwxrwxr-x 1 swift swift 979 8월 28 23:58 ros-noetic-install.sh*
swift@swift-System-Product-Name:~/Desktop$ sudo bash ./install_geographiclib_datasets.sh
[sudo] password for swift:
GeographicLib geoids dataset egm96-5 already exists, skipping
GeographicLib gravity dataset egm96 already exists, skipping
GeographicLib magnetic dataset emm2015 already exists, skipping
swift@swift-System-Product-Name:~/Desktop$
필수 유틸리티 설치
swift@swift-System-Product-Name:~/workspace/catkin_ws$ sudo apt install python3-pip
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following package was automatically installed and is no longer required:
libllvm11
Use 'sudo apt autoremove' to remove it.
The following additional packages will be installed:
python-pip-whl python3-wheel
The following NEW packages will be installed:
python-pip-whl python3-pip python3-wheel
0 upgraded, 3 newly installed, 0 to remove and 0 not upgraded.
Need to get 2,060 kB of archives.
After this operation, 3,465 kB of additional disk space will be used.
Do you want to continue? [Y/n] Y
Get:1 http://kr.archive.ubuntu.com/ubuntu focal-updates/universe amd64 python-pip-whl all 20.0.2-5ubuntu1.6 [1,805 kB]
Get:2 http://kr.archive.ubuntu.com/ubuntu focal/universe amd64 python3-wheel all 0.34.2-1 [23.8 kB]
Get:3 http://kr.archive.ubuntu.com/ubuntu focal-updates/universe amd64 python3-pip all 20.0.2-5ubuntu1.6 [231 kB]
Fetched 2,060 kB in 3s (610 kB/s)
Selecting previously unselected package python-pip-whl.
(Reading database ... 288230 files and directories currently installed.)
Preparing to unpack .../python-pip-whl_20.0.2-5ubuntu1.6_all.deb ...
Unpacking python-pip-whl (20.0.2-5ubuntu1.6) ...
Selecting previously unselected package python3-wheel.
Preparing to unpack .../python3-wheel_0.34.2-1_all.deb ...
Unpacking python3-wheel (0.34.2-1) ...
Selecting previously unselected package python3-pip.
Preparing to unpack .../python3-pip_20.0.2-5ubuntu1.6_all.deb ...
Unpacking python3-pip (20.0.2-5ubuntu1.6) ...
Setting up python3-wheel (0.34.2-1) ...
Setting up python-pip-whl (20.0.2-5ubuntu1.6) ...
Setting up python3-pip (20.0.2-5ubuntu1.6) ...
Processing triggers for man-db (2.9.1-1) ...
swift@swift-System-Product-Name:~/workspace/catkin_ws$ pip install jinja2
Collecting jinja2
Downloading Jinja2-3.0.1-py3-none-any.whl (133 kB)
|████████████████████████████████| 133 kB 1.5 MB/s
Collecting MarkupSafe>=2.0
Downloading MarkupSafe-2.0.1-cp38-cp38-manylinux2010_x86_64.whl (30 kB)
Installing collected packages: MarkupSafe, jinja2
Successfully installed MarkupSafe-2.0.1 jinja2-3.0.1
swift@swift-System-Product-Name:~/workspace/catkin_ws$ pip3 install --user packaging
Collecting packaging
Downloading packaging-21.0-py3-none-any.whl (40 kB)
|████████████████████████████████| 40 kB 2.3 MB/s
Requirement already satisfied: pyparsing>=2.0.2 in /usr/lib/python3/dist-packages (from packaging) (2.4.6)
Installing collected packages: packaging
Successfully installed packaging-21.0
swift@swift-System-Product-Name:~/workspace/catkin_ws$
swift@swift-System-Product-Name:~/workspace/catkin_ws$ pip3 install --user toml
Collecting toml
Downloading toml-0.10.2-py2.py3-none-any.whl (16 kB)
Installing collected packages: toml
Successfully installed toml-0.10.2
swift@swift-System-Product-Name:~/workspace/catkin_ws$
swift@swift-System-Product-Name:~/workspace/catkin_ws$ pip3 install --user jsonschema
Collecting jsonschema
Downloading jsonschema-3.2.0-py2.py3-none-any.whl (56 kB)
|████████████████████████████████| 56 kB 1.4 MB/s
Requirement already satisfied: attrs>=17.4.0 in /usr/lib/python3/dist-packages (from jsonschema) (19.3.0)
Requirement already satisfied: setuptools in /usr/lib/python3/dist-packages (from jsonschema) (45.2.0)
Collecting pyrsistent>=0.14.0
Downloading pyrsistent-0.18.0-cp38-cp38-manylinux1_x86_64.whl (118 kB)
|████████████████████████████████| 118 kB 2.4 MB/s
Requirement already satisfied: six>=1.11.0 in /usr/lib/python3/dist-packages (from jsonschema) (1.14.0)
Installing collected packages: pyrsistent, jsonschema
WARNING: The script jsonschema is installed in '/home/swift/.local/bin' which is not on PATH.
Consider adding this directory to PATH or, if you prefer to suppress this warning, use --no-warn-script-location.
Successfully installed jsonschema-3.2.0 pyrsistent-0.18.0
catkin_tools 설치
swift@swift-System-Product-Name:~/catkin_ws/src$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -sc` main" > /etc/apt/sources.list.d/ros-latest.list'
swift@swift-System-Product-Name:~/catkin_ws/src$ wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
--2021-08-29 00:35:37-- http://packages.ros.org/ros.key
Resolving packages.ros.org (packages.ros.org)... 64.50.236.52, 140.211.166.134, 64.50.233.100, ...
Connecting to packages.ros.org (packages.ros.org)|64.50.236.52|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 1167 (1.1K)
Saving to: ‘STDOUT’
- 100%[====================================================>] 1.14K --.-KB/s in 0s
2021-08-29 00:35:38 (57.9 MB/s) - written to stdout [1167/1167]
OK
swift@swift-System-Product-Name:~/catkin_ws/src$ sudo apt-get update
Hit:1 http://packages.ros.org/ros/ubuntu focal InRelease
Hit:2 http://kr.archive.ubuntu.com/ubuntu focal InRelease
Get:3 http://security.ubuntu.com/ubuntu focal-security InRelease [114 kB]
Get:4 http://kr.archive.ubuntu.com/ubuntu focal-updates InRelease [114 kB]
Get:5 http://security.ubuntu.com/ubuntu focal-security/main amd64 DEP-11 Metadata [27.6 kB]
Get:6 http://kr.archive.ubuntu.com/ubuntu focal-backports InRelease [101 kB]
Get:7 http://security.ubuntu.com/ubuntu focal-security/universe amd64 DEP-11 Metadata [61.1 kB]
Get:8 http://security.ubuntu.com/ubuntu focal-security/multiverse amd64 DEP-11 Metadata [2,464 B]
Get:9 http://kr.archive.ubuntu.com/ubuntu focal-updates/main amd64 DEP-11 Metadata [283 kB]
Get:10 http://kr.archive.ubuntu.com/ubuntu focal-updates/universe amd64 DEP-11 Metadata [351 kB]
Get:11 http://kr.archive.ubuntu.com/ubuntu focal-updates/multiverse amd64 DEP-11 Metadata [944 B]
Get:12 http://kr.archive.ubuntu.com/ubuntu focal-backports/universe amd64 DEP-11 Metadata [10.3 kB]
Fetched 1,065 kB in 3s (345 kB/s)
Reading package lists... Done
swift@swift-System-Product-Name:~/catkin_ws/src$ sudo apt-get install python3-catkin-tools
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following package was automatically installed and is no longer required:
libllvm11
Use 'sudo apt autoremove' to remove it.
The following additional packages will be installed:
python3-osrf-pycommon
The following NEW packages will be installed:
python3-catkin-tools python3-osrf-pycommon
0 upgraded, 2 newly installed, 0 to remove and 0 not upgraded.
Need to get 340 kB of archives.
After this operation, 941 kB of additional disk space will be used.
Do you want to continue? [Y/n] y
Get:1 http://packages.ros.org/ros/ubuntu focal/main amd64 python3-osrf-pycommon all 1.0.0-1 [23.2 kB]
Get:2 http://packages.ros.org/ros/ubuntu focal/main amd64 python3-catkin-tools all 0.7.1-1 [316 kB]
Fetched 340 kB in 2s (207 kB/s)
Selecting previously unselected package python3-osrf-pycommon.
(Reading database ... 288086 files and directories currently installed.)
Preparing to unpack .../python3-osrf-pycommon_1.0.0-1_all.deb ...
Unpacking python3-osrf-pycommon (1.0.0-1) ...
Selecting previously unselected package python3-catkin-tools.
Preparing to unpack .../python3-catkin-tools_0.7.1-1_all.deb ...
Unpacking python3-catkin-tools (0.7.1-1) ...
Setting up python3-osrf-pycommon (1.0.0-1) ...
Setting up python3-catkin-tools (0.7.1-1) ...
swift@swift-System-Product-Name:~/catkin_ws/src$
catkin 초기화
swift@swift-System-Product-Name:~/catkin_ws$ catkin init
Initializing catkin workspace in `/home/swift/catkin_ws`.
----------------------------------------------------------
Profile: default
Extending: [cached] /opt/ros/noetic
Workspace: /home/swift/catkin_ws
----------------------------------------------------------
Build Space: [exists] /home/swift/catkin_ws/build
Devel Space: [exists] /home/swift/catkin_ws/devel
Install Space: [unused] /home/swift/catkin_ws/install
Log Space: [missing] /home/swift/catkin_ws/logs
Source Space: [exists] /home/swift/catkin_ws/src
DESTDIR: [unused] None
----------------------------------------------------------
Devel Space Layout: linked
Install Space Layout: None
----------------------------------------------------------
Additional CMake Args: None
Additional Make Args: None
Additional catkin Make Args: None
Internal Make Job Server: True
Cache Job Environments: False
----------------------------------------------------------
Whitelisted Packages: None
Blacklisted Packages: None
----------------------------------------------------------
Workspace configuration appears valid.
----------------------------------------------------------
swift@swift-System-Product-Name:~/catkin_ws$ wstool init src
Writing /home/swift/catkin_ws/src/.rosinstall
update complete.
swift@swift-System-Product-Name:~/catkin_ws$
PX4 펌웨어 코드 다운로드 및 컴파일
swift@swift-System-Product-Name:~/workspace/catkin_ws$ git clone https://github.com/PX4/PX4-Autopilot.git
Cloning into 'PX4-Autopilot'...
remote: Enumerating objects: 367042, done.
remote: Total 367042 (delta 0), reused 0 (delta 0), pack-reused 367042
Receiving objects: 100% (367042/367042), 155.68 MiB | 9.08 MiB/s, done.
Resolving deltas: 100% (272155/272155), done.
swift@swift-System-Product-Name:~/workspace/catkin_ws$ cd PX4-Autopilot/
swift@swift-System-Product-Name:~/workspace/catkin_ws/PX4-Autopilot$ git submodule update --init --recursive
Submodule 'Tools/flightgear_bridge' (https://github.com/PX4/PX4-FlightGear-Bridge.git) registered for path 'Tools/flightgear_bridge'
Submodule 'Tools/jMAVSim' (https://github.com/PX4/jMAVSim.git) registered for path 'Tools/jMAVSim'
Submodule 'Tools/jsbsim_bridge' (https://github.com/PX4/px4-jsbsim-bridge.git) registered for path 'Tools/jsbsim_bridge'
Submodule 'Tools/simulation-ignition' (https://github.com/Auterion/px4-simulation-ignition.git) registered for path 'Tools/simulation-ignition'
Submodule 'Tools/sitl_gazebo' (https://github.com/PX4/PX4-SITL_gazebo.git) registered for path 'Tools/sitl_gazebo'
Submodule 'mavlink/include/mavlink/v2.0' (https://github.com/mavlink/c_library_v2.git) registered for path 'mavlink/include/mavlink/v2.0'
Submodule 'platforms/nuttx/NuttX/apps' (https://github.com/PX4/NuttX-apps.git) registered for path 'platforms/nuttx/NuttX/apps'
Submodule 'platforms/nuttx/NuttX/nuttx' (https://github.com/PX4/NuttX.git) registered for path 'platforms/nuttx/NuttX/nuttx'
Submodule 'src/drivers/gps/devices' (https://github.com/PX4/PX4-GPSDrivers.git) registered for path 'src/drivers/gps/devices'
Submodule 'src/drivers/uavcan/libuavcan' (https://github.com/PX4/libuavcan.git) registered for path 'src/drivers/uavcan/libuavcan'
Submodule 'src/drivers/uavcan_v1/legacy_data_types' (https://github.com/PX4/public_regulated_data_types.git) registered for path 'src/drivers/uavcan_v1/legacy_data_types'
Submodule 'src/drivers/uavcan_v1/libcanard' (https://github.com/UAVCAN/libcanard.git) registered for path 'src/drivers/uavcan_v1/libcanard'
Submodule 'src/drivers/uavcan_v1/public_regulated_data_types' (https://github.com/UAVCAN/public_regulated_data_types.git) registered for path 'src/drivers/uavcan_v1/public_regulated_data_types'
Submodule 'src/drivers/uavcannode_gps_demo/libcanard' (https://github.com/UAVCAN/libcanard.git) registered for path 'src/drivers/uavcannode_gps_demo/libcanard'
Submodule 'src/drivers/uavcannode_gps_demo/public_regulated_data_types' (https://github.com/UAVCAN/public_regulated_data_types.git) registered for path 'src/drivers/uavcannode_gps_demo/public_regulated_data_types'
Submodule 'src/lib/crypto/monocypher' (https://github.com/PX4/Monocypher.git) registered for path 'src/lib/crypto/monocypher'
Submodule 'src/lib/events/libevents' (https://github.com/mavlink/libevents.git) registered for path 'src/lib/events/libevents'
Submodule 'src/lib/matrix' (https://github.com/PX4/PX4-Matrix.git) registered for path 'src/lib/matrix'
Submodule 'src/modules/micrortps_bridge/micro-CDR' (https://github.com/PX4/Micro-CDR.git) registered for path 'src/modules/micrortps_bridge/micro-CDR'
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/flightgear_bridge'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/jMAVSim'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/jsbsim_bridge'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/simulation-ignition'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/sitl_gazebo'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/mavlink/include/mavlink/v2.0'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/platforms/nuttx/NuttX/apps'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/platforms/nuttx/NuttX/nuttx'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/drivers/gps/devices'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/drivers/uavcan/libuavcan'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/drivers/uavcan_v1/legacy_data_types'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/drivers/uavcan_v1/libcanard'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/drivers/uavcan_v1/public_regulated_data_types'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/drivers/uavcannode_gps_demo/libcanard'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/drivers/uavcannode_gps_demo/public_regulated_data_types'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/lib/crypto/monocypher'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/lib/events/libevents'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/lib/matrix'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/modules/micrortps_bridge/micro-CDR'...
Submodule path 'Tools/flightgear_bridge': checked out '7c2c623da9f5dcb3f01d32830af1a2ed958de363'
Submodule 'models/FlightGear-Rascal' (https://github.com/ThunderFly-aerospace/FlightGear-Rascal.git) registered for path 'Tools/flightgear_bridge/models/Rascal'
Submodule 'models/FlightGear-TF-G1' (https://github.com/ThunderFly-aerospace/FlightGear-TF-G1.git) registered for path 'Tools/flightgear_bridge/models/TF-G1'
Submodule 'models/FlightGear-TF-G2' (https://github.com/ThunderFly-aerospace/FlightGear-TF-G2.git) registered for path 'Tools/flightgear_bridge/models/TF-G2'
Submodule 'models/FlightGear-TF-R1' (https://github.com/ThunderFly-aerospace/FlightGear-TF-R1.git) registered for path 'Tools/flightgear_bridge/models/TF-R1'
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/flightgear_bridge/models/Rascal'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/flightgear_bridge/models/TF-G1'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/flightgear_bridge/models/TF-G2'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/flightgear_bridge/models/TF-R1'...
Submodule path 'Tools/flightgear_bridge/models/Rascal': checked out 'cbdb2fc7dd44331da1dcd04a891ed7f8c27b1ef0'
Submodule path 'Tools/flightgear_bridge/models/TF-G1': checked out '4540de7ae8e71b9bd6e6f67d085695be0ab36bc3'
Submodule path 'Tools/flightgear_bridge/models/TF-G2': checked out '562ee71388c493675269210f7692d8b7a8bb800d'
Submodule path 'Tools/flightgear_bridge/models/TF-R1': checked out '158e429a0110589b1e2adfe868e166271470e144'
Submodule path 'Tools/jMAVSim': checked out '0a5375a70689aac53143768de9033034f3636022'
Submodule 'jMAVlib' (https://github.com/PX4/jMAVlib.git) registered for path 'Tools/jMAVSim/jMAVlib'
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/jMAVSim/jMAVlib'...
Submodule path 'Tools/jMAVSim/jMAVlib': checked out 'c08380767b21938391bec676a43b36b837af9ba4'
Submodule path 'Tools/jsbsim_bridge': checked out 'e070c50d591541d440510b65c9da5cad1db5aa9a'
Submodule 'models/ATI-Resolution' (https://github.com/FGMEMBERS/ATI-Resolution.git) registered for path 'Tools/jsbsim_bridge/models/ATI-Resolution'
Submodule 'models/Rascal' (https://github.com/Auterion/FlightGear-Rascal.git) registered for path 'Tools/jsbsim_bridge/models/Rascal'
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/jsbsim_bridge/models/ATI-Resolution'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/jsbsim_bridge/models/Rascal'...
Submodule path 'Tools/jsbsim_bridge/models/ATI-Resolution': checked out '40571cd808a204f4062128daeb6bb6db8c134c48'
Submodule path 'Tools/jsbsim_bridge/models/Rascal': checked out 'd0d1db1961549e557885002cf9c3cff40cc27be2'
Submodule path 'Tools/simulation-ignition': checked out '794a8dc50538e3476f6d874744d3d3ef24da594d'
Submodule path 'Tools/sitl_gazebo': checked out '7fda4d311a9daff4bec4f2fe83e63fde0b8f04b0'
Submodule 'external/OpticalFlow' (https://github.com/PX4/OpticalFlow.git) registered for path 'Tools/sitl_gazebo/external/OpticalFlow'
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/sitl_gazebo/external/OpticalFlow'...
Submodule path 'Tools/sitl_gazebo/external/OpticalFlow': checked out '28ef45c1fcb532b2bfd54c16b059c6a545143b2f'
Submodule 'external/klt_feature_tracker' (https://github.com/ethz-ait/klt_feature_tracker.git) registered for path 'Tools/sitl_gazebo/external/OpticalFlow/external/klt_feature_tracker'
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/Tools/sitl_gazebo/external/OpticalFlow/external/klt_feature_tracker'...
Submodule path 'Tools/sitl_gazebo/external/OpticalFlow/external/klt_feature_tracker': checked out '9b5b567ae77f93d1ef4d36151529ba2506a46e7a'
Submodule path 'mavlink/include/mavlink/v2.0': checked out 'e0e24de6228326101ff85dd5cdea638f2569c70e'
Submodule path 'platforms/nuttx/NuttX/apps': checked out '0d06c1cb836e597d5c54728963e6f412b21775ff'
Submodule path 'platforms/nuttx/NuttX/nuttx': checked out '8660572a3c69e0e2ca24c3cabeaaaae3372a6960'
Submodule path 'src/drivers/gps/devices': checked out '6fcf06894973240d45dc49d3b31565917dc8f2f6'
Submodule path 'src/drivers/uavcan/libuavcan': checked out '29e1aa6c12e3590252b102153d8c62155047a676'
Submodule 'dsdl' (https://github.com/UAVCAN/dsdl) registered for path 'src/drivers/uavcan/libuavcan/dsdl'
Submodule 'libuavcan/dsdl_compiler/pyuavcan' (https://github.com/UAVCAN/pyuavcan) registered for path 'src/drivers/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan'
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/drivers/uavcan/libuavcan/dsdl'...
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/drivers/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan'...
Submodule path 'src/drivers/uavcan/libuavcan/dsdl': checked out '192295c4f9b67f4a20b0eabf74757b6597415f2b'
Submodule path 'src/drivers/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan': checked out 'c58477a644d20ccf95a20c151f3a0402f271c3b8'
Submodule 'dsdl' (https://github.com/UAVCAN/dsdl) registered for path 'src/drivers/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan/dsdl'
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/drivers/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan/dsdl'...
Submodule path 'src/drivers/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan/dsdl': checked out 'fd12483ddd4e58242d61d74a163e7aeaa1e0f466'
Submodule path 'src/drivers/uavcan_v1/legacy_data_types': checked out '36a01e428b110ff84c8babe5b65667b5e3037d5e'
Submodule path 'src/drivers/uavcan_v1/libcanard': checked out '2a116170285fb47fcaae150ad21c2ccde0756a5f'
Submodule path 'src/drivers/uavcan_v1/public_regulated_data_types': checked out '0a773b93ce5c94e1d2791b180058cb9897fab7e1'
Submodule path 'src/drivers/uavcannode_gps_demo/libcanard': checked out '2a116170285fb47fcaae150ad21c2ccde0756a5f'
Submodule path 'src/drivers/uavcannode_gps_demo/public_regulated_data_types': checked out '0a773b93ce5c94e1d2791b180058cb9897fab7e1'
Submodule path 'src/lib/crypto/monocypher': checked out 'baca5d31259c598540e4d1284bc8d8f793abf83a'
Submodule path 'src/lib/events/libevents': checked out '5fd19be22dcbeaccb8afeba146f3a7c931a9b5fb'
Submodule 'libs/cpp/parse/nlohmann_json' (https://github.com/ArthurSonzogni/nlohmann_json_cmake_fetchcontent.git) registered for path 'src/lib/events/libevents/libs/cpp/parse/nlohmann_json'
Cloning into '/home/swift/workspace/catkin_ws/PX4-Autopilot/src/lib/events/libevents/libs/cpp/parse/nlohmann_json'...
Submodule path 'src/lib/events/libevents/libs/cpp/parse/nlohmann_json': checked out '391786c6c3abdd3eeb993a3154f1f2a4cfe137a0'
Submodule path 'src/lib/matrix': checked out '3d1c9b988dff1d95f36cdd1df3e84d7a2365501c'
Submodule path 'src/modules/micrortps_bridge/micro-CDR': checked out '21d3cfe3ae570d1674da0105ab23b80958e0449a'
swift@swift-System-Product-Name:~/workspace/catkin_ws/PX4-Autopilot$ ^C
swift@swift-System-Product-Name:~/workspace/catkin_ws/PX4-Autopilot$
예제 프로젝트 코드 다운로드
swift@swift-System-Product-Name:~/workspace/catkin_ws$ git clone https://github.com/PX4/PX4-Autopilot.git
Cloning into 'PX4-Autopilot'...
remote: Enumerating objects: 367042, done.
remote: Total 367042 (delta 0), reused 0 (delta 0), pack-reused 367042
Receiving objects: 100% (367042/367042), 155.68 MiB | 9.08 MiB/s, done.
Resolving deltas: 100% (272155/272155), done.
catkin_make 로 PX4 펌웨어 및 예제 프로젝트 컴파일 수행
swift@swift-System-Product-Name:~/workspace/catkin_ws$ catkin_make
Base path: /home/swift/workspace/catkin_ws
Source space: /home/swift/workspace/catkin_ws/src
Build space: /home/swift/workspace/catkin_ws/build
Devel space: /home/swift/workspace/catkin_ws/devel
Install space: /home/swift/workspace/catkin_ws/install
####
#### Running command: "make cmake_check_build_system" in "/home/swift/workspace/catkin_ws/build"
####
####
#### Running command: "make -j12 -l12" in "/home/swift/workspace/catkin_ws/build"
####
[ 0%] Built target events_header
[ 0%] Built target flighttasks_generated
[ 0%] Built target test_setpoints_traj
[ 0%] Built target pub_setpoints_att
[ 0%] Built target pub_setpoints_traj
[ 0%] Built target pub_setpoints_pos
[ 0%] Built target generate_topic_listener
[ 1%] Built target drivers_board
[ 1%] Built target ver_gen
[ 2%] Built target parameters_xml
[ 2%] Built target uorb_headers
[ 2%] Built target mixer_gen_6dof
[ 2%] Built target git_mavlink_v2
[ 2%] Built target git_gps_devices
[ 3%] Generating ../../logs
[ 4%] Built target mixer_gen
[ 4%] Built target perf
[ 4%] Built target tinybson
[ 6%] Built target work_queue
[ 6%] Built target MixerBase
[ 6%] Built target output_limit
[ 6%] Built target geo
[ 6%] Built target logs_symlink
[ 6%] Generating combined event json file
[ 6%] Built target wind_estimator
[ 7%] Built target rc
[ 7%] Built target world_magnetic_model
[ 8%] Built target MultirotorMixer
[ 8%] Built target version
[ 8%] Built target AllocatedActuatorMixer
[ 8%] Built target NullMixer
[ 8%] Built target HelicopterMixer
[ 8%] Built target SimpleMixer
[ 8%] Built target mixer
[ 28%] Built target uorb_msgs
[ 29%] Built target parameters
Scanning dependencies of target px4_work_queue
[ 29%] Building CXX object PX4-Autopilot/platforms/common/px4_work_queue/CMakeFiles/px4_work_queue.dir/WorkItemSingleShot.cpp.o
[ 29%] Building CXX object PX4-Autopilot/platforms/common/px4_work_queue/CMakeFiles/px4_work_queue.dir/ScheduledWorkItem.cpp.o
[ 29%] Building CXX object PX4-Autopilot/platforms/common/px4_work_queue/CMakeFiles/px4_work_queue.dir/WorkQueue.cpp.o
[ 29%] Building CXX object PX4-Autopilot/platforms/common/px4_work_queue/CMakeFiles/px4_work_queue.dir/WorkItem.cpp.o
[ 29%] Building CXX object PX4-Autopilot/platforms/common/px4_work_queue/CMakeFiles/px4_work_queue.dir/WorkQueueManager.cpp.o
[ 29%] Built target events_json
Scanning dependencies of target component_general_json
[ 30%] Generating component_general.json and checksums.h
[ 30%] Built target component_general_json
Scanning dependencies of target romfs_gen_files_target
[ 30%] Generating ../romfs_files.tar
[ 30%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libpx4_work_queue.a
[ 30%] Generating romfs_extract.stamp
[ 30%] Built target px4_work_queue
Scanning dependencies of target uORB
[ 30%] Building CXX object PX4-Autopilot/platforms/common/uORB/CMakeFiles/uORB.dir/Subscription.cpp.o
[ 30%] Building CXX object PX4-Autopilot/platforms/common/uORB/CMakeFiles/uORB.dir/uORB.cpp.o
[ 30%] ROMFS: copying, generating airframes
[ 30%] Building CXX object PX4-Autopilot/platforms/common/uORB/CMakeFiles/uORB.dir/uORBManager.cpp.o
[ 30%] Building CXX object PX4-Autopilot/platforms/common/uORB/CMakeFiles/uORB.dir/uORBDeviceNode.cpp.o
[ 30%] Building CXX object PX4-Autopilot/platforms/common/uORB/CMakeFiles/uORB.dir/uORBDeviceMaster.cpp.o
[ 30%] Building CXX object PX4-Autopilot/platforms/common/uORB/CMakeFiles/uORB.dir/uORBUtils.cpp.o
[ 31%] ROMFS: copying extras
[ 31%] Built target romfs_gen_files_target
[ 31%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libuORB.a
[ 31%] Built target uORB
Scanning dependencies of target px4_platform
[ 31%] Building CXX object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/external_reset_lockout.cpp.o
[ 31%] Building C object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/board_identity.c.o
[ 31%] Building CXX object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/px4_cli.cpp.o
[ 31%] Building CXX object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/i2c.cpp.o
[ 31%] Building C object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/px4_getopt.c.o
[ 31%] Building CXX object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/module.cpp.o
[ 31%] Building CXX object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/i2c_spi_buses.cpp.o
[ 32%] Building CXX object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/events.cpp.o
[ 32%] Building CXX object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/shutdown.cpp.o
[ 33%] Building CXX object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/px4_log.cpp.o
[ 33%] Building CXX object PX4-Autopilot/platforms/common/CMakeFiles/px4_platform.dir/spi.cpp.o
[ 33%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libpx4_platform.a
[ 33%] Built target px4_platform
Scanning dependencies of target lockstep_scheduler
[ 33%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/lockstep_scheduler/CMakeFiles/lockstep_scheduler.dir/src/lockstep_scheduler.cpp.o
[ 33%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/lockstep_scheduler/CMakeFiles/lockstep_scheduler.dir/src/lockstep_components.cpp.o
[ 33%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/liblockstep_scheduler.a
[ 33%] Built target lockstep_scheduler
Scanning dependencies of target px4_daemon
[ 33%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/px4_daemon/CMakeFiles/px4_daemon.dir/history.cpp.o
[ 33%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/px4_daemon/CMakeFiles/px4_daemon.dir/client.cpp.o
[ 33%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/px4_daemon/CMakeFiles/px4_daemon.dir/server.cpp.o
[ 33%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/px4_daemon/CMakeFiles/px4_daemon.dir/sock_protocol.cpp.o
[ 33%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/px4_daemon/CMakeFiles/px4_daemon.dir/pxh.cpp.o
[ 33%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/px4_daemon/CMakeFiles/px4_daemon.dir/server_io.cpp.o
[ 33%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libpx4_daemon.a
[ 33%] Built target px4_daemon
Scanning dependencies of target px4_layer
[ 33%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/CMakeFiles/px4_layer.dir/drv_hrt.cpp.o
[ 34%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/CMakeFiles/px4_layer.dir/px4_posix_impl.cpp.o
[ 34%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/CMakeFiles/px4_layer.dir/tasks.cpp.o
[ 34%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/CMakeFiles/px4_layer.dir/px4_sem.cpp.o
[ 34%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/CMakeFiles/px4_layer.dir/px4_init.cpp.o
[ 34%] Building C object PX4-Autopilot/platforms/posix/src/px4/common/CMakeFiles/px4_layer.dir/lib_crc32.c.o
[ 34%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/CMakeFiles/px4_layer.dir/print_load.cpp.o
[ 34%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/common/CMakeFiles/px4_layer.dir/cpuload.cpp.o
[ 34%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libpx4_layer.a
[ 34%] Built target px4_layer
Scanning dependencies of target cdev
[ 34%] Building CXX object PX4-Autopilot/src/lib/cdev/CMakeFiles/cdev.dir/posix/cdev_platform.cpp.o
[ 34%] Building CXX object PX4-Autopilot/src/lib/cdev/CMakeFiles/cdev.dir/CDev.cpp.o
[ 34%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libcdev.a
[ 34%] Built target cdev
Scanning dependencies of target airspeed
Scanning dependencies of target bezier
Scanning dependencies of target battery
Scanning dependencies of target hysteresis
Scanning dependencies of target circuit_breaker
Scanning dependencies of target CollisionPrevention
Scanning dependencies of target systemlib
Scanning dependencies of target conversion
Scanning dependencies of target controllib
Scanning dependencies of target drivers_barometer
Scanning dependencies of target l1
Scanning dependencies of target drivers__device
[ 35%] Building CXX object PX4-Autopilot/src/lib/circuit_breaker/CMakeFiles/circuit_breaker.dir/circuit_breaker.cpp.o
[ 35%] Building CXX object PX4-Autopilot/src/lib/hysteresis/CMakeFiles/hysteresis.dir/hysteresis.cpp.o
[ 35%] Building CXX object PX4-Autopilot/src/lib/bezier/CMakeFiles/bezier.dir/BezierQuad.cpp.o
[ 35%] Building CXX object PX4-Autopilot/src/lib/conversion/CMakeFiles/conversion.dir/rotation.cpp.o
[ 35%] Building C object PX4-Autopilot/src/lib/systemlib/CMakeFiles/systemlib.dir/conversions.c.o
[ 35%] Building CXX object PX4-Autopilot/src/lib/battery/CMakeFiles/battery.dir/battery.cpp.o
[ 35%] Building CXX object PX4-Autopilot/src/lib/drivers/barometer/CMakeFiles/drivers_barometer.dir/PX4Barometer.cpp.o
[ 35%] Building CXX object PX4-Autopilot/src/lib/airspeed/CMakeFiles/airspeed.dir/airspeed.cpp.o
[ 35%] Building CXX object PX4-Autopilot/src/lib/collision_prevention/CMakeFiles/CollisionPrevention.dir/CollisionPrevention.cpp.o
[ 35%] Building CXX object PX4-Autopilot/src/lib/l1/CMakeFiles/l1.dir/ECL_L1_Pos_Controller.cpp.o
[ 35%] Building CXX object PX4-Autopilot/src/lib/controllib/CMakeFiles/controllib.dir/block/Block.cpp.o
[ 37%] Building CXX object PX4-Autopilot/src/lib/drivers/device/CMakeFiles/drivers__device.dir/CDev.cpp.o
[ 37%] Building C object PX4-Autopilot/src/lib/systemlib/CMakeFiles/systemlib.dir/crc.c.o
[ 37%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libcircuit_breaker.a
[ 37%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libhysteresis.a
[ 37%] Built target circuit_breaker
[ 37%] Built target hysteresis
[ 37%] Building CXX object PX4-Autopilot/src/lib/bezier/CMakeFiles/bezier.dir/BezierN.cpp.o
[ 37%] Building CXX object PX4-Autopilot/src/lib/systemlib/CMakeFiles/systemlib.dir/mavlink_log.cpp.o
[ 37%] Building CXX object PX4-Autopilot/src/lib/drivers/device/CMakeFiles/drivers__device.dir/posix/I2C.cpp.o
[ 37%] Building CXX object PX4-Autopilot/src/lib/drivers/device/CMakeFiles/drivers__device.dir/posix/SPI.cpp.o
Scanning dependencies of target landing_slope
[ 37%] Building CXX object PX4-Autopilot/src/lib/landing_slope/CMakeFiles/landing_slope.dir/Landingslope.cpp.o
[ 37%] Building CXX object PX4-Autopilot/src/lib/controllib/CMakeFiles/controllib.dir/block/BlockParam.cpp.o
[ 37%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libconversion.a
[ 37%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libairspeed.a
[ 37%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers_barometer.a
[ 37%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemlib.a
[ 37%] Built target conversion
Scanning dependencies of target mathlib
[ 37%] Built target drivers_barometer
[ 37%] Building CXX object PX4-Autopilot/src/lib/mathlib/CMakeFiles/mathlib.dir/math/test/test.cpp.o
[ 37%] Built target systemlib
Scanning dependencies of target mixer_module
Scanning dependencies of target motion_planning
[ 37%] Built target airspeed
[ 37%] Building CXX object PX4-Autopilot/src/lib/controllib/CMakeFiles/controllib.dir/BlockDerivative.cpp.o
[ 37%] Building CXX object PX4-Autopilot/src/lib/mixer_module/CMakeFiles/mixer_module.dir/mixer_module.cpp.o
[ 38%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libbattery.a
[ 38%] Building CXX object PX4-Autopilot/src/lib/motion_planning/CMakeFiles/motion_planning.dir/VelocitySmoothing.cpp.o
[ 38%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/liblanding_slope.a
[ 38%] Built target battery
Scanning dependencies of target pid
[ 38%] Building CXX object PX4-Autopilot/src/lib/controllib/CMakeFiles/controllib.dir/BlockHighPass.cpp.o
[ 38%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libl1.a
Scanning dependencies of target lib__rc__rc_tests
[ 39%] Building CXX object PX4-Autopilot/src/lib/pid/CMakeFiles/pid.dir/pid.cpp.o
[ 39%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmathlib.a
[ 39%] Building CXX object PX4-Autopilot/src/lib/rc/rc_tests/CMakeFiles/lib__rc__rc_tests.dir/RCTest.cpp.o
[ 39%] Built target l1
[ 39%] Built target landing_slope
[ 39%] Building CXX object PX4-Autopilot/src/lib/controllib/CMakeFiles/controllib.dir/BlockIntegral.cpp.o
Scanning dependencies of target sensor_calibration
[ 39%] Built target mathlib
[ 39%] Building CXX object PX4-Autopilot/src/lib/sensor_calibration/CMakeFiles/sensor_calibration.dir/Accelerometer.cpp.o
[ 39%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers__device.a
Scanning dependencies of target tecs
[ 39%] Building CXX object PX4-Autopilot/src/lib/sensor_calibration/CMakeFiles/sensor_calibration.dir/Gyroscope.cpp.o
[ 39%] Built target drivers__device
[ 39%] Building CXX object PX4-Autopilot/src/lib/tecs/CMakeFiles/tecs.dir/TECS.cpp.o
[ 39%] Building CXX object PX4-Autopilot/src/lib/controllib/CMakeFiles/controllib.dir/BlockIntegralTrap.cpp.o
[ 39%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libpid.a
Scanning dependencies of target tunes
[ 39%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmotion_planning.a
[ 39%] Building CXX object PX4-Autopilot/src/lib/tunes/CMakeFiles/tunes.dir/tunes.cpp.o
[ 39%] Built target pid
[ 39%] Building CXX object PX4-Autopilot/src/lib/sensor_calibration/CMakeFiles/sensor_calibration.dir/Magnetometer.cpp.o
[ 39%] Building CXX object PX4-Autopilot/src/lib/sensor_calibration/CMakeFiles/sensor_calibration.dir/Utilities.cpp.o
[ 39%] Built target motion_planning
[ 39%] Building CXX object PX4-Autopilot/src/lib/tunes/CMakeFiles/tunes.dir/default_tunes.cpp.o
[ 39%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libbezier.a
[ 39%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/liblib__rc__rc_tests.a
[ 39%] Building CXX object PX4-Autopilot/src/lib/controllib/CMakeFiles/controllib.dir/BlockLimit.cpp.o
Scanning dependencies of target WeatherVane
[ 39%] Building CXX object PX4-Autopilot/src/lib/weather_vane/CMakeFiles/WeatherVane.dir/WeatherVane.cpp.o
[ 39%] Built target bezier
[ 39%] Built target lib__rc__rc_tests
[ 39%] Building CXX object PX4-Autopilot/src/lib/controllib/CMakeFiles/controllib.dir/BlockLimitSym.cpp.o
[ 40%] Building CXX object PX4-Autopilot/src/lib/controllib/CMakeFiles/controllib.dir/BlockLowPass.cpp.o
[ 41%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libtecs.a
[ 42%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libtunes.a
[ 42%] Built target tecs
[ 42%] Built target tunes
[ 42%] Building CXX object PX4-Autopilot/src/lib/controllib/CMakeFiles/controllib.dir/BlockLowPass2.cpp.o
Scanning dependencies of target arch_tone_alarm
Scanning dependencies of target modules__uORB__uORB_tests
[ 42%] Building CXX object PX4-Autopilot/platforms/posix/src/px4/generic/generic/tone_alarm/CMakeFiles/arch_tone_alarm.dir/ToneAlarmInterface.cpp.o
Scanning dependencies of target lib__work_queue__test__wqueue_test
[ 42%] Building CXX object PX4-Autopilot/platforms/common/uORB/uORB_tests/CMakeFiles/modules__uORB__uORB_tests.dir/uORB_tests_main.cpp.o
[ 42%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libCollisionPrevention.a
[ 43%] Building CXX object PX4-Autopilot/platforms/common/px4_work_queue/test/CMakeFiles/lib__work_queue__test__wqueue_test.dir/wqueue_main.cpp.o
[ 43%] Built target CollisionPrevention
Scanning dependencies of target drivers__camera_capture
[ 43%] Building CXX object PX4-Autopilot/platforms/common/uORB/uORB_tests/CMakeFiles/modules__uORB__uORB_tests.dir/uORBTest_UnitTest.cpp.o
[ 43%] Building CXX object PX4-Autopilot/src/drivers/camera_capture/CMakeFiles/drivers__camera_capture.dir/camera_capture.cpp.o
[ 43%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libarch_tone_alarm.a
[ 44%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libWeatherVane.a
Scanning dependencies of target drivers__camera_trigger
Scanning dependencies of target drivers__gps
[ 44%] Building CXX object PX4-Autopilot/src/drivers/camera_trigger/CMakeFiles/drivers__camera_trigger.dir/camera_trigger.cpp.o
[ 44%] Building CXX object PX4-Autopilot/src/drivers/gps/CMakeFiles/drivers__gps.dir/gps.cpp.o
[ 44%] Built target arch_tone_alarm
[ 44%] Built target WeatherVane
[ 44%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libcontrollib.a
Scanning dependencies of target examples__rpm_simulator
[ 44%] Building CXX object PX4-Autopilot/platforms/common/px4_work_queue/test/CMakeFiles/lib__work_queue__test__wqueue_test.dir/wqueue_scheduled_test.cpp.o
Scanning dependencies of target drivers__tone_alarm
[ 44%] Building CXX object PX4-Autopilot/src/drivers/rpm/rpm_simulator/CMakeFiles/examples__rpm_simulator.dir/rpm_simulator.cpp.o
[ 44%] Building CXX object PX4-Autopilot/src/drivers/camera_trigger/CMakeFiles/drivers__camera_trigger.dir/interfaces/src/camera_interface.cpp.o
[ 44%] Built target controllib
[ 44%] Building CXX object PX4-Autopilot/src/drivers/tone_alarm/CMakeFiles/drivers__tone_alarm.dir/ToneAlarm.cpp.o
[ 44%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmixer_module.a
Scanning dependencies of target modules__airship_att_control
[ 44%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsensor_calibration.a
[ 44%] Building CXX object PX4-Autopilot/src/modules/airship_att_control/CMakeFiles/modules__airship_att_control.dir/airship_att_control_main.cpp.o
[ 44%] Built target mixer_module
Scanning dependencies of target modules__airspeed_selector
[ 44%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libexamples__rpm_simulator.a
Scanning dependencies of target modules__attitude_estimator_q
[ 44%] Built target sensor_calibration
[ 44%] Building CXX object PX4-Autopilot/src/modules/airspeed_selector/CMakeFiles/modules__airspeed_selector.dir/airspeed_selector_main.cpp.o
Scanning dependencies of target modules__camera_feedback
[ 44%] Building CXX object PX4-Autopilot/src/drivers/camera_trigger/CMakeFiles/drivers__camera_trigger.dir/interfaces/src/pwm.cpp.o
[ 44%] Building CXX object PX4-Autopilot/src/modules/attitude_estimator_q/CMakeFiles/modules__attitude_estimator_q.dir/attitude_estimator_q_main.cpp.o
[ 44%] Building CXX object PX4-Autopilot/src/modules/camera_feedback/CMakeFiles/modules__camera_feedback.dir/CameraFeedback.cpp.o
[ 44%] Built target examples__rpm_simulator
[ 44%] Building CXX object PX4-Autopilot/platforms/common/px4_work_queue/test/CMakeFiles/lib__work_queue__test__wqueue_test.dir/wqueue_start.cpp.o
[ 44%] Building CXX object PX4-Autopilot/platforms/common/px4_work_queue/test/CMakeFiles/lib__work_queue__test__wqueue_test.dir/wqueue_test.cpp.o
Scanning dependencies of target failure_detector
[ 44%] Building CXX object PX4-Autopilot/src/modules/commander/failure_detector/CMakeFiles/failure_detector.dir/FailureDetector.cpp.o
[ 44%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers__camera_capture.a
Scanning dependencies of target ArmAuthorization
[ 44%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/ArmAuthorization/CMakeFiles/ArmAuthorization.dir/ArmAuthorization.cpp.o
[ 44%] Built target drivers__camera_capture
[ 44%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/liblib__work_queue__test__wqueue_test.a
Scanning dependencies of target HealthFlags
[ 46%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/HealthFlags/CMakeFiles/HealthFlags.dir/HealthFlags.cpp.o
[ 46%] Built target lib__work_queue__test__wqueue_test
[ 46%] Building CXX object PX4-Autopilot/src/drivers/camera_trigger/CMakeFiles/drivers__camera_trigger.dir/interfaces/src/seagull_map2.cpp.o
Scanning dependencies of target modules__commander__commander_tests
[ 46%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libHealthFlags.a
[ 46%] Building CXX object PX4-Autopilot/src/modules/commander/commander_tests/CMakeFiles/modules__commander__commander_tests.dir/commander_tests.cpp.o
[ 46%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__uORB__uORB_tests.a
[ 46%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libArmAuthorization.a
[ 46%] Built target HealthFlags
[ 46%] Built target modules__uORB__uORB_tests
[ 46%] Building CXX object PX4-Autopilot/src/drivers/camera_trigger/CMakeFiles/drivers__camera_trigger.dir/interfaces/src/gpio.cpp.o
[ 46%] Building CXX object PX4-Autopilot/src/modules/airspeed_selector/CMakeFiles/modules__airspeed_selector.dir/AirspeedValidator.cpp.o
[ 46%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers__tone_alarm.a
[ 46%] Built target ArmAuthorization
Scanning dependencies of target EKF2Utility
Scanning dependencies of target modules__dataman
[ 46%] Building CXX object PX4-Autopilot/src/modules/commander/commander_tests/CMakeFiles/modules__commander__commander_tests.dir/state_machine_helper_test.cpp.o
[ 46%] Building CXX object PX4-Autopilot/src/modules/ekf2/Utility/CMakeFiles/EKF2Utility.dir/PreFlightChecker.cpp.o
[ 46%] Built target drivers__tone_alarm
[ 46%] Building CXX object PX4-Autopilot/src/modules/dataman/CMakeFiles/modules__dataman.dir/dataman.cpp.o
Scanning dependencies of target modules__events
[ 46%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers__camera_trigger.a
[ 46%] Building CXX object PX4-Autopilot/src/drivers/gps/CMakeFiles/drivers__gps.dir/devices/src/gps_helper.cpp.o
[ 46%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__airship_att_control.a
[ 46%] Building CXX object PX4-Autopilot/src/modules/events/CMakeFiles/modules__events.dir/rc_loss_alarm.cpp.o
[ 46%] Built target drivers__camera_trigger
[ 46%] Built target modules__airship_att_control
[ 46%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__camera_feedback.a
[ 46%] Building CXX object PX4-Autopilot/src/drivers/gps/CMakeFiles/drivers__gps.dir/devices/src/mtk.cpp.o
[ 46%] Building CXX object PX4-Autopilot/src/modules/commander/commander_tests/CMakeFiles/modules__commander__commander_tests.dir/__/state_machine_helper.cpp.o
[ 46%] Built target modules__camera_feedback
Scanning dependencies of target FlightTask
[ 46%] Building CXX object PX4-Autopilot/src/drivers/gps/CMakeFiles/drivers__gps.dir/devices/src/ashtech.cpp.o
[ 46%] Building CXX object PX4-Autopilot/src/drivers/gps/CMakeFiles/drivers__gps.dir/devices/src/ubx.cpp.o
[ 46%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/FlightTask/CMakeFiles/FlightTask.dir/FlightTask.cpp.o
[ 47%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libEKF2Utility.a
[ 48%] Building CXX object PX4-Autopilot/src/drivers/gps/CMakeFiles/drivers__gps.dir/devices/src/rtcm.cpp.o
[ 48%] Built target EKF2Utility
[ 48%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libfailure_detector.a
[ 48%] Building CXX object PX4-Autopilot/src/drivers/gps/CMakeFiles/drivers__gps.dir/devices/src/emlid_reach.cpp.o
[ 48%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__dataman.a
[ 48%] Building CXX object PX4-Autopilot/src/modules/events/CMakeFiles/modules__events.dir/send_event.cpp.o
[ 48%] Built target failure_detector
[ 48%] Building CXX object PX4-Autopilot/src/drivers/gps/CMakeFiles/drivers__gps.dir/devices/src/femtomes.cpp.o
[ 49%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__airspeed_selector.a
Scanning dependencies of target modules__fw_att_control
[ 49%] Built target modules__airspeed_selector
[ 49%] Built target modules__dataman
[ 49%] Building CXX object PX4-Autopilot/src/modules/fw_att_control/CMakeFiles/modules__fw_att_control.dir/FixedwingAttitudeControl.cpp.o
[ 49%] Building CXX object PX4-Autopilot/src/modules/events/CMakeFiles/modules__events.dir/set_leds.cpp.o
Scanning dependencies of target launchdetection
[ 49%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__commander__commander_tests.a
[ 49%] Building CXX object PX4-Autopilot/src/modules/fw_pos_control_l1/launchdetection/CMakeFiles/launchdetection.dir/LaunchDetector.cpp.o
[ 49%] Building CXX object PX4-Autopilot/src/drivers/gps/CMakeFiles/drivers__gps.dir/devices/src/nmea.cpp.o
[ 50%] Building CXX object PX4-Autopilot/src/modules/fw_att_control/CMakeFiles/modules__fw_att_control.dir/ecl_controller.cpp.o
[ 50%] Built target modules__commander__commander_tests
Scanning dependencies of target runway_takeoff
[ 50%] Building CXX object PX4-Autopilot/src/modules/fw_pos_control_l1/runway_takeoff/CMakeFiles/runway_takeoff.dir/RunwayTakeoff.cpp.o
[ 50%] Building CXX object PX4-Autopilot/src/modules/fw_pos_control_l1/launchdetection/CMakeFiles/launchdetection.dir/CatapultLaunchMethod.cpp.o
Scanning dependencies of target modules__gyro_calibration
Scanning dependencies of target modules__gyro_fft
Scanning dependencies of target modules__land_detector
[ 50%] Building CXX object PX4-Autopilot/src/modules/gyro_fft/CMakeFiles/modules__gyro_fft.dir/GyroFFT.cpp.o
[ 50%] Building CXX object PX4-Autopilot/src/modules/gyro_calibration/CMakeFiles/modules__gyro_calibration.dir/GyroCalibration.cpp.o
[ 50%] Building C object PX4-Autopilot/src/modules/gyro_fft/CMakeFiles/modules__gyro_fft.dir/CMSIS_5/CMSIS/DSP/Source/BasicMathFunctions/arm_mult_q15.c.o
[ 50%] Building CXX object PX4-Autopilot/src/modules/land_detector/CMakeFiles/modules__land_detector.dir/land_detector_main.cpp.o
[ 50%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTask.a
Scanning dependencies of target modules__landing_target_estimator
[ 50%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__attitude_estimator_q.a
[ 50%] Building CXX object PX4-Autopilot/src/modules/landing_target_estimator/CMakeFiles/modules__landing_target_estimator.dir/landing_target_estimator_main.cpp.o
[ 50%] Built target FlightTask
[ 50%] Building CXX object PX4-Autopilot/src/modules/landing_target_estimator/CMakeFiles/modules__landing_target_estimator.dir/LandingTargetEstimator.cpp.o
[ 50%] Built target modules__attitude_estimator_q
[ 50%] Building CXX object PX4-Autopilot/src/modules/events/CMakeFiles/modules__events.dir/status_display.cpp.o
Scanning dependencies of target modules__load_mon
[ 50%] Building CXX object PX4-Autopilot/src/modules/land_detector/CMakeFiles/modules__land_detector.dir/LandDetector.cpp.o
[ 50%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/liblaunchdetection.a
[ 50%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/librunway_takeoff.a
[ 50%] Building CXX object PX4-Autopilot/src/modules/load_mon/CMakeFiles/modules__load_mon.dir/LoadMon.cpp.o
[ 50%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers__gps.a
[ 50%] Built target launchdetection
Scanning dependencies of target modules__local_position_estimator
[ 50%] Built target runway_takeoff
Scanning dependencies of target modules__logger
[ 50%] Built target drivers__gps
Scanning dependencies of target modules__mavlink__mavlink_tests
[ 50%] Building CXX object PX4-Autopilot/src/modules/local_position_estimator/CMakeFiles/modules__local_position_estimator.dir/BlockLocalPositionEstimator.cpp.o
[ 50%] Building CXX object PX4-Autopilot/src/modules/logger/CMakeFiles/modules__logger.dir/logged_topics.cpp.o
[ 51%] Building CXX object PX4-Autopilot/src/modules/mavlink/mavlink_tests/CMakeFiles/modules__mavlink__mavlink_tests.dir/mavlink_tests.cpp.o
[ 51%] Building CXX object PX4-Autopilot/src/modules/mavlink/mavlink_tests/CMakeFiles/modules__mavlink__mavlink_tests.dir/mavlink_ftp_test.cpp.o
[ 52%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__events.a
Scanning dependencies of target AttitudeControl
[ 52%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__load_mon.a
[ 52%] Built target modules__events
[ 52%] Building CXX object PX4-Autopilot/src/modules/mc_att_control/AttitudeControl/CMakeFiles/AttitudeControl.dir/AttitudeControl.cpp.o
[ 52%] Building CXX object PX4-Autopilot/src/modules/logger/CMakeFiles/modules__logger.dir/logger.cpp.o
[ 52%] Building CXX object PX4-Autopilot/src/modules/logger/CMakeFiles/modules__logger.dir/log_writer.cpp.o
[ 52%] Built target modules__load_mon
[ 52%] Building CXX object PX4-Autopilot/src/modules/mavlink/mavlink_tests/CMakeFiles/modules__mavlink__mavlink_tests.dir/__/mavlink_stream.cpp.o
[ 52%] Building CXX object PX4-Autopilot/src/modules/landing_target_estimator/CMakeFiles/modules__landing_target_estimator.dir/KalmanFilter.cpp.o
[ 52%] Building CXX object PX4-Autopilot/src/modules/mavlink/mavlink_tests/CMakeFiles/modules__mavlink__mavlink_tests.dir/__/mavlink_ftp.cpp.o
[ 52%] Building CXX object PX4-Autopilot/src/modules/land_detector/CMakeFiles/modules__land_detector.dir/MulticopterLandDetector.cpp.o
[ 52%] Building CXX object PX4-Autopilot/src/modules/fw_att_control/CMakeFiles/modules__fw_att_control.dir/ecl_roll_controller.cpp.o
[ 52%] Building CXX object PX4-Autopilot/src/modules/fw_att_control/CMakeFiles/modules__fw_att_control.dir/ecl_pitch_controller.cpp.o
[ 53%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__gyro_calibration.a
[ 53%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libAttitudeControl.a
[ 53%] Building C object PX4-Autopilot/src/modules/gyro_fft/CMakeFiles/modules__gyro_fft.dir/CMSIS_5/CMSIS/DSP/Source/CommonTables/arm_common_tables.c.o
[ 53%] Built target modules__gyro_calibration
[ 53%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__landing_target_estimator.a
[ 53%] Building C object PX4-Autopilot/src/modules/gyro_fft/CMakeFiles/modules__gyro_fft.dir/CMSIS_5/CMSIS/DSP/Source/CommonTables/arm_const_structs.c.o
[ 53%] Built target AttitudeControl
[ 53%] Built target modules__landing_target_estimator
[ 53%] Building CXX object PX4-Autopilot/src/modules/land_detector/CMakeFiles/modules__land_detector.dir/FixedwingLandDetector.cpp.o
Scanning dependencies of target zero_order_hover_thrust_ekf
[ 53%] Building CXX object PX4-Autopilot/src/modules/fw_att_control/CMakeFiles/modules__fw_att_control.dir/ecl_wheel_controller.cpp.o
[ 53%] Building CXX object PX4-Autopilot/src/modules/mc_hover_thrust_estimator/CMakeFiles/zero_order_hover_thrust_ekf.dir/zero_order_hover_thrust_ekf.cpp.o
[ 53%] Building CXX object PX4-Autopilot/src/modules/land_detector/CMakeFiles/modules__land_detector.dir/VtolLandDetector.cpp.o
[ 53%] Building CXX object PX4-Autopilot/src/modules/fw_att_control/CMakeFiles/modules__fw_att_control.dir/ecl_yaw_controller.cpp.o
[ 53%] Building C object PX4-Autopilot/src/modules/gyro_fft/CMakeFiles/modules__gyro_fft.dir/CMSIS_5/CMSIS/DSP/Source/SupportFunctions/arm_float_to_q15.c.o
[ 55%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libzero_order_hover_thrust_ekf.a
[ 55%] Building C object PX4-Autopilot/src/modules/gyro_fft/CMakeFiles/modules__gyro_fft.dir/CMSIS_5/CMSIS/DSP/Source/TransformFunctions/arm_bitreversal2.c.o
[ 55%] Built target zero_order_hover_thrust_ekf
[ 55%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__fw_att_control.a
Scanning dependencies of target PositionControl
[ 55%] Building CXX object PX4-Autopilot/src/modules/land_detector/CMakeFiles/modules__land_detector.dir/RoverLandDetector.cpp.o
[ 55%] Building CXX object PX4-Autopilot/src/modules/mc_pos_control/PositionControl/CMakeFiles/PositionControl.dir/PositionControl.cpp.o
[ 55%] Building CXX object PX4-Autopilot/src/modules/mc_pos_control/PositionControl/CMakeFiles/PositionControl.dir/ControlMath.cpp.o
[ 55%] Built target modules__fw_att_control
[ 56%] Building CXX object PX4-Autopilot/src/modules/land_detector/CMakeFiles/modules__land_detector.dir/AirshipLandDetector.cpp.o
Scanning dependencies of target Takeoff
[ 56%] Building CXX object PX4-Autopilot/src/modules/mc_pos_control/Takeoff/CMakeFiles/Takeoff.dir/Takeoff.cpp.o
[ 56%] Building C object PX4-Autopilot/src/modules/gyro_fft/CMakeFiles/modules__gyro_fft.dir/CMSIS_5/CMSIS/DSP/Source/TransformFunctions/arm_cfft_q15.c.o
[ 56%] Building C object PX4-Autopilot/src/modules/gyro_fft/CMakeFiles/modules__gyro_fft.dir/CMSIS_5/CMSIS/DSP/Source/TransformFunctions/arm_cfft_radix4_q15.c.o
Scanning dependencies of target RateControl
[ 56%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libTakeoff.a
[ 56%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__mavlink__mavlink_tests.a
[ 57%] Building CXX object PX4-Autopilot/src/modules/mc_rate_control/RateControl/CMakeFiles/RateControl.dir/RateControl.cpp.o
[ 57%] Built target Takeoff
[ 58%] Building C object PX4-Autopilot/src/modules/gyro_fft/CMakeFiles/modules__gyro_fft.dir/CMSIS_5/CMSIS/DSP/Source/TransformFunctions/arm_rfft_init_q15.c.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/local_position_estimator/CMakeFiles/modules__local_position_estimator.dir/sensors/flow.cpp.o
[ 59%] Built target modules__mavlink__mavlink_tests
[ 59%] Building CXX object PX4-Autopilot/src/modules/local_position_estimator/CMakeFiles/modules__local_position_estimator.dir/sensors/sonar.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/local_position_estimator/CMakeFiles/modules__local_position_estimator.dir/sensors/lidar.cpp.o
[ 59%] Building C object PX4-Autopilot/src/modules/gyro_fft/CMakeFiles/modules__gyro_fft.dir/CMSIS_5/CMSIS/DSP/Source/TransformFunctions/arm_rfft_q15.c.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/logger/CMakeFiles/modules__logger.dir/log_writer_file.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/local_position_estimator/CMakeFiles/modules__local_position_estimator.dir/sensors/gps.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/local_position_estimator/CMakeFiles/modules__local_position_estimator.dir/sensors/baro.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/logger/CMakeFiles/modules__logger.dir/log_writer_mavlink.cpp.o
[ 59%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__gyro_fft.a
[ 59%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libPositionControl.a
[ 59%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libRateControl.a
[ 59%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__land_detector.a
[ 59%] Built target PositionControl
[ 59%] Built target RateControl
[ 59%] Building CXX object PX4-Autopilot/src/modules/logger/CMakeFiles/modules__logger.dir/util.cpp.o
[ 59%] Built target modules__gyro_fft
[ 59%] Built target modules__land_detector
Scanning dependencies of target geofence_breach_avoidance
[ 59%] Building CXX object PX4-Autopilot/src/modules/logger/CMakeFiles/modules__logger.dir/watchdog.cpp.o
Scanning dependencies of target modules__rc_update
[ 59%] Building CXX object PX4-Autopilot/src/modules/rc_update/CMakeFiles/modules__rc_update.dir/rc_update.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/navigator/GeofenceBreachAvoidance/CMakeFiles/geofence_breach_avoidance.dir/geofence_breach_avoidance.cpp.o
Scanning dependencies of target modules__replay
Scanning dependencies of target modules__rover_pos_control
Scanning dependencies of target data_validator
[ 59%] Building CXX object PX4-Autopilot/src/modules/rover_pos_control/CMakeFiles/modules__rover_pos_control.dir/RoverPositionControl.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/sensors/data_validator/CMakeFiles/data_validator.dir/DataValidator.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/replay/CMakeFiles/modules__replay.dir/replay_main.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/local_position_estimator/CMakeFiles/modules__local_position_estimator.dir/sensors/vision.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/sensors/data_validator/CMakeFiles/data_validator.dir/DataValidatorGroup.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/local_position_estimator/CMakeFiles/modules__local_position_estimator.dir/sensors/mocap.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/local_position_estimator/CMakeFiles/modules__local_position_estimator.dir/sensors/land.cpp.o
[ 59%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__logger.a
[ 59%] Building CXX object PX4-Autopilot/src/modules/local_position_estimator/CMakeFiles/modules__local_position_estimator.dir/sensors/landing_target.cpp.o
[ 59%] Building CXX object PX4-Autopilot/src/modules/replay/CMakeFiles/modules__replay.dir/Replay.cpp.o
[ 59%] Built target modules__logger
[ 59%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libgeofence_breach_avoidance.a
Scanning dependencies of target vehicle_acceleration
[ 59%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdata_validator.a
[ 60%] Building CXX object PX4-Autopilot/src/modules/sensors/vehicle_acceleration/CMakeFiles/vehicle_acceleration.dir/VehicleAcceleration.cpp.o
[ 60%] Built target data_validator
[ 60%] Built target geofence_breach_avoidance
Scanning dependencies of target vehicle_angular_velocity
[ 60%] Building CXX object PX4-Autopilot/src/modules/replay/CMakeFiles/modules__replay.dir/ReplayEkf2.cpp.o
Scanning dependencies of target vehicle_air_data
Scanning dependencies of target vehicle_gps_position
[ 60%] Building CXX object PX4-Autopilot/src/modules/sensors/vehicle_air_data/CMakeFiles/vehicle_air_data.dir/VehicleAirData.cpp.o
[ 60%] Building CXX object PX4-Autopilot/src/modules/sensors/vehicle_angular_velocity/CMakeFiles/vehicle_angular_velocity.dir/VehicleAngularVelocity.cpp.o
[ 60%] Building CXX object PX4-Autopilot/src/modules/sensors/vehicle_gps_position/CMakeFiles/vehicle_gps_position.dir/VehicleGPSPosition.cpp.o
[ 60%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__rc_update.a
Scanning dependencies of target vehicle_imu
[ 61%] Building CXX object PX4-Autopilot/src/modules/sensors/vehicle_imu/CMakeFiles/vehicle_imu.dir/VehicleIMU.cpp.o
[ 61%] Built target modules__rc_update
Scanning dependencies of target vehicle_magnetometer
Scanning dependencies of target modules__simulator__battery_simulator
[ 61%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__rover_pos_control.a
[ 61%] Building CXX object PX4-Autopilot/src/modules/simulator/battery_simulator/CMakeFiles/modules__simulator__battery_simulator.dir/BatterySimulator.cpp.o
[ 61%] Building CXX object PX4-Autopilot/src/modules/sensors/vehicle_magnetometer/CMakeFiles/vehicle_magnetometer.dir/VehicleMagnetometer.cpp.o
[ 61%] Building CXX object PX4-Autopilot/src/modules/sensors/vehicle_gps_position/CMakeFiles/vehicle_gps_position.dir/gps_blending.cpp.o
[ 62%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__local_position_estimator.a
Scanning dependencies of target modules__temperature_compensation
[ 62%] Built target modules__rover_pos_control
[ 62%] Building CXX object PX4-Autopilot/src/modules/temperature_compensation/CMakeFiles/modules__temperature_compensation.dir/TemperatureCompensationModule.cpp.o
[ 64%] Building CXX object PX4-Autopilot/src/modules/temperature_compensation/CMakeFiles/modules__temperature_compensation.dir/TemperatureCompensation.cpp.o
[ 64%] Built target modules__local_position_estimator
[ 64%] Building CXX object PX4-Autopilot/src/modules/temperature_compensation/CMakeFiles/modules__temperature_compensation.dir/temperature_calibration/accel.cpp.o
Scanning dependencies of target modules__uuv_att_control
[ 65%] Building CXX object PX4-Autopilot/src/modules/uuv_att_control/CMakeFiles/modules__uuv_att_control.dir/uuv_att_control.cpp.o
[ 65%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libvehicle_acceleration.a
[ 65%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libvehicle_air_data.a
[ 65%] Built target vehicle_acceleration
[ 65%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libvehicle_gps_position.a
[ 65%] Building CXX object PX4-Autopilot/src/modules/temperature_compensation/CMakeFiles/modules__temperature_compensation.dir/temperature_calibration/baro.cpp.o
[ 65%] Built target vehicle_air_data
Scanning dependencies of target modules__uuv_pos_control
[ 65%] Built target vehicle_gps_position
[ 65%] Building CXX object PX4-Autopilot/src/modules/uuv_pos_control/CMakeFiles/modules__uuv_pos_control.dir/uuv_pos_control.cpp.o
[ 65%] Building CXX object PX4-Autopilot/src/modules/temperature_compensation/CMakeFiles/modules__temperature_compensation.dir/temperature_calibration/gyro.cpp.o
Scanning dependencies of target drivers__vmount
[ 65%] Building CXX object PX4-Autopilot/src/modules/vmount/CMakeFiles/drivers__vmount.dir/input.cpp.o
[ 65%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__simulator__battery_simulator.a
[ 65%] Building CXX object PX4-Autopilot/src/modules/temperature_compensation/CMakeFiles/modules__temperature_compensation.dir/temperature_calibration/task.cpp.o
[ 65%] Building CXX object PX4-Autopilot/src/modules/vmount/CMakeFiles/drivers__vmount.dir/input_mavlink.cpp.o
[ 65%] Built target modules__simulator__battery_simulator
Scanning dependencies of target modules__vtol_att_control
[ 65%] Building CXX object PX4-Autopilot/src/modules/vtol_att_control/CMakeFiles/modules__vtol_att_control.dir/vtol_att_control_main.cpp.o
Scanning dependencies of target systemcmds__dyn
[ 65%] Building CXX object PX4-Autopilot/src/modules/vmount/CMakeFiles/drivers__vmount.dir/input_rc.cpp.o
[ 65%] Building CXX object PX4-Autopilot/src/systemcmds/dyn/CMakeFiles/systemcmds__dyn.dir/dyn.cpp.o
[ 65%] Building CXX object PX4-Autopilot/src/modules/vmount/CMakeFiles/drivers__vmount.dir/input_test.cpp.o
[ 65%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libvehicle_angular_velocity.a
[ 65%] Built target vehicle_angular_velocity
Scanning dependencies of target systemcmds__esc_calib
[ 65%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__temperature_compensation.a
[ 65%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__replay.a
[ 65%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__dyn.a
[ 66%] Building C object PX4-Autopilot/src/systemcmds/esc_calib/CMakeFiles/systemcmds__esc_calib.dir/esc_calib.c.o
[ 67%] Building CXX object PX4-Autopilot/src/modules/vmount/CMakeFiles/drivers__vmount.dir/output.cpp.o
[ 67%] Built target modules__temperature_compensation
Scanning dependencies of target systemcmds__failure
[ 67%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libvehicle_magnetometer.a
[ 67%] Built target systemcmds__dyn
[ 67%] Built target modules__replay
Scanning dependencies of target systemcmds__led_control
[ 67%] Building CXX object PX4-Autopilot/src/systemcmds/failure/CMakeFiles/systemcmds__failure.dir/failure.cpp.o
Scanning dependencies of target systemcmds__mixer
[ 67%] Building CXX object PX4-Autopilot/src/modules/vmount/CMakeFiles/drivers__vmount.dir/output_mavlink.cpp.o
[ 67%] Building CXX object PX4-Autopilot/src/systemcmds/mixer/CMakeFiles/systemcmds__mixer.dir/mixer.cpp.o
[ 67%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__uuv_att_control.a
[ 67%] Building CXX object PX4-Autopilot/src/systemcmds/led_control/CMakeFiles/systemcmds__led_control.dir/led_control.cpp.o
[ 67%] Built target vehicle_magnetometer
[ 67%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libvehicle_imu.a
Scanning dependencies of target systemcmds__motor_ramp
[ 67%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__esc_calib.a
[ 67%] Built target modules__uuv_att_control
[ 67%] Built target vehicle_imu
Scanning dependencies of target systemcmds__motor_test
[ 67%] Building CXX object PX4-Autopilot/src/modules/vmount/CMakeFiles/drivers__vmount.dir/output_rc.cpp.o
[ 67%] Building CXX object PX4-Autopilot/src/systemcmds/motor_ramp/CMakeFiles/systemcmds__motor_ramp.dir/motor_ramp.cpp.o
[ 67%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__uuv_pos_control.a
[ 67%] Building CXX object PX4-Autopilot/src/systemcmds/motor_test/CMakeFiles/systemcmds__motor_test.dir/motor_test.cpp.o
[ 67%] Built target systemcmds__esc_calib
Scanning dependencies of target systemcmds__param
[ 67%] Building CXX object PX4-Autopilot/src/systemcmds/param/CMakeFiles/systemcmds__param.dir/param.cpp.o
[ 67%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__led_control.a
[ 67%] Built target modules__uuv_pos_control
[ 67%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__mixer.a
Scanning dependencies of target systemcmds__perf
[ 67%] Built target systemcmds__led_control
[ 67%] Building CXX object PX4-Autopilot/src/modules/vmount/CMakeFiles/drivers__vmount.dir/vmount.cpp.o
[ 67%] Building C object PX4-Autopilot/src/systemcmds/perf/CMakeFiles/systemcmds__perf.dir/perf.c.o
[ 67%] Built target systemcmds__mixer
[ 67%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__motor_test.a
Scanning dependencies of target systemcmds__pwm
[ 68%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__motor_ramp.a
Scanning dependencies of target systemcmds__sd_bench
[ 68%] Building CXX object PX4-Autopilot/src/systemcmds/pwm/CMakeFiles/systemcmds__pwm.dir/pwm.cpp.o
[ 69%] Building C object PX4-Autopilot/src/systemcmds/sd_bench/CMakeFiles/systemcmds__sd_bench.dir/sd_bench.c.o
[ 69%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__perf.a
[ 69%] Built target systemcmds__motor_test
Scanning dependencies of target systemcmds__shutdown
[ 69%] Built target systemcmds__motor_ramp
[ 69%] Built target systemcmds__perf
[ 69%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__failure.a
[ 69%] Building CXX object PX4-Autopilot/src/systemcmds/shutdown/CMakeFiles/systemcmds__shutdown.dir/shutdown.cpp.o
Scanning dependencies of target systemcmds__tests
Scanning dependencies of target systemcmds__system_time
[ 69%] Building CXX object PX4-Autopilot/src/systemcmds/system_time/CMakeFiles/systemcmds__system_time.dir/system_time.cpp.o
[ 69%] Built target systemcmds__failure
[ 69%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__sd_bench.a
Scanning dependencies of target systemcmds__tests__hrt_test
[ 69%] Building CXX object PX4-Autopilot/src/modules/vtol_att_control/CMakeFiles/modules__vtol_att_control.dir/tiltrotor.cpp.o
Scanning dependencies of target systemcmds__topic_listener
[ 69%] Building CXX object PX4-Autopilot/src/systemcmds/tests/hrt_test/CMakeFiles/systemcmds__tests__hrt_test.dir/hrt_test_main.cpp.o
[ 69%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_atomic_bitset.cpp.o
[ 69%] Building CXX object PX4-Autopilot/src/systemcmds/topic_listener/CMakeFiles/systemcmds__topic_listener.dir/listener_main.cpp.o
[ 69%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__param.a
[ 69%] Built target systemcmds__sd_bench
[ 69%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__shutdown.a
Scanning dependencies of target systemcmds__uorb
Scanning dependencies of target systemcmds__tune_control
[ 69%] Built target systemcmds__param
[ 69%] Building CXX object PX4-Autopilot/src/modules/vtol_att_control/CMakeFiles/modules__vtol_att_control.dir/vtol_type.cpp.o
[ 69%] Building CXX object PX4-Autopilot/src/systemcmds/tune_control/CMakeFiles/systemcmds__tune_control.dir/tune_control.cpp.o
[ 69%] Building CXX object PX4-Autopilot/src/systemcmds/uorb/CMakeFiles/systemcmds__uorb.dir/uorb.cpp.o
[ 69%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_bezierQuad.cpp.o
[ 69%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__system_time.a
[ 69%] Built target systemcmds__shutdown
[ 69%] Building CXX object PX4-Autopilot/src/systemcmds/tests/hrt_test/CMakeFiles/systemcmds__tests__hrt_test.dir/hrt_test_start.cpp.o
Scanning dependencies of target systemcmds__ver
[ 70%] Building C object PX4-Autopilot/src/systemcmds/ver/CMakeFiles/systemcmds__ver.dir/ver.c.o
[ 70%] Built target systemcmds__system_time
[ 70%] Building CXX object PX4-Autopilot/src/systemcmds/topic_listener/CMakeFiles/systemcmds__topic_listener.dir/listener_generated.cpp.o
[ 70%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__uorb.a
[ 70%] Building CXX object PX4-Autopilot/src/systemcmds/tests/hrt_test/CMakeFiles/systemcmds__tests__hrt_test.dir/hrt_test.cpp.o
[ 70%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_bitset.cpp.o
[ 70%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__pwm.a
[ 70%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__tune_control.a
[ 70%] Built target systemcmds__pwm
[ 70%] Built target systemcmds__uorb
[ 70%] Building CXX object PX4-Autopilot/src/modules/vtol_att_control/CMakeFiles/modules__vtol_att_control.dir/tailsitter.cpp.o
[ 71%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_bson.cpp.o
[ 71%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_conv.cpp.o
[ 71%] Built target systemcmds__tune_control
[ 73%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__tests__hrt_test.a
[ 73%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__ver.a
[ 73%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_dataman.c.o
[ 73%] Built target systemcmds__tests__hrt_test
Scanning dependencies of target systemcmds__work_queue
[ 73%] Built target systemcmds__ver
[ 73%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers__vmount.a
[ 73%] Building CXX object PX4-Autopilot/src/systemcmds/work_queue/CMakeFiles/systemcmds__work_queue.dir/work_queue_main.cpp.o
Scanning dependencies of target modules__fake_gps
[ 73%] Building CXX object PX4-Autopilot/src/examples/fake_gps/CMakeFiles/modules__fake_gps.dir/FakeGps.cpp.o
Scanning dependencies of target examples__fixedwing_control
[ 73%] Building CXX object PX4-Autopilot/src/examples/fixedwing_control/CMakeFiles/examples__fixedwing_control.dir/main.cpp.o
[ 73%] Built target drivers__vmount
[ 73%] Building CXX object PX4-Autopilot/src/modules/vtol_att_control/CMakeFiles/modules__vtol_att_control.dir/standard.cpp.o
Scanning dependencies of target examples__hello
[ 73%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_file.c.o
[ 73%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_file2.c.o
[ 73%] Building CXX object PX4-Autopilot/src/examples/hello/CMakeFiles/examples__hello.dir/hello_main.cpp.o
[ 73%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__work_queue.a
[ 73%] Building CXX object PX4-Autopilot/src/examples/hello/CMakeFiles/examples__hello.dir/hello_start.cpp.o
[ 73%] Built target systemcmds__work_queue
[ 73%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_float.cpp.o
[ 73%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_hott_telemetry.c.o
Scanning dependencies of target examples__px4_mavlink_debug
[ 73%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_hrt.cpp.o
[ 73%] Building CXX object PX4-Autopilot/src/examples/px4_mavlink_debug/CMakeFiles/examples__px4_mavlink_debug.dir/px4_mavlink_debug.cpp.o
[ 73%] Building CXX object PX4-Autopilot/src/examples/hello/CMakeFiles/examples__hello.dir/hello_example.cpp.o
[ 73%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_int.cpp.o
[ 74%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_i2c_spi_cli.cpp.o
Scanning dependencies of target examples__px4_simple_app
[ 75%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libexamples__px4_mavlink_debug.a
[ 75%] Building C object PX4-Autopilot/src/examples/px4_simple_app/CMakeFiles/examples__px4_simple_app.dir/px4_simple_app.c.o
[ 75%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libexamples__hello.a
Scanning dependencies of target examples__rover_steering_control
Scanning dependencies of target examples__uuv_example_app
[ 75%] Built target examples__hello
[ 75%] Built target examples__px4_mavlink_debug
[ 75%] Building CXX object PX4-Autopilot/src/examples/rover_steering_control/CMakeFiles/examples__rover_steering_control.dir/main.cpp.o
[ 75%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_IntrusiveQueue.cpp.o
[ 75%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libexamples__px4_simple_app.a
Scanning dependencies of target examples__work_item
[ 75%] Building CXX object PX4-Autopilot/src/examples/uuv_example_app/CMakeFiles/examples__uuv_example_app.dir/uuv_example_app.cpp.o
[ 75%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_led.c.o
[ 76%] Building CXX object PX4-Autopilot/src/examples/work_item/CMakeFiles/examples__work_item.dir/WorkItemExample.cpp.o
[ 76%] Built target examples__px4_simple_app
Scanning dependencies of target avoidance
[ 76%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__fake_gps.a
[ 76%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_List.cpp.o
[ 76%] Building CXX object PX4-Autopilot/src/lib/avoidance/CMakeFiles/avoidance.dir/ObstacleAvoidance.cpp.o
[ 76%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_IntrusiveSortedList.cpp.o
[ 76%] Built target modules__fake_gps
[ 76%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libexamples__fixedwing_control.a
Scanning dependencies of target lib__cdev__test__cdev_test
[ 77%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__vtol_att_control.a
[ 77%] Built target examples__fixedwing_control
[ 77%] Building CXX object PX4-Autopilot/src/lib/cdev/test/CMakeFiles/lib__cdev__test__cdev_test.dir/cdevtest_example.cpp.o
Scanning dependencies of target lib__controllib__controllib_test
[ 77%] Building CXX object PX4-Autopilot/src/lib/controllib/controllib_test/CMakeFiles/lib__controllib__controllib_test.dir/controllib_test_main.cpp.o
[ 77%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libexamples__uuv_example_app.a
[ 77%] Built target modules__vtol_att_control
[ 77%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_mathlib.cpp.o
Scanning dependencies of target drivers_accelerometer
[ 77%] Building CXX object PX4-Autopilot/src/lib/drivers/accelerometer/CMakeFiles/drivers_accelerometer.dir/PX4Accelerometer.cpp.o
[ 77%] Built target examples__uuv_example_app
[ 77%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__topic_listener.a
[ 77%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_matrix.cpp.o
[ 77%] Built target systemcmds__topic_listener
[ 77%] Building CXX object PX4-Autopilot/src/lib/cdev/test/CMakeFiles/lib__cdev__test__cdev_test.dir/cdevtest_main.cpp.o
[ 77%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_param.c.o
[ 77%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_mixer.cpp.o
[ 78%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_parameters.cpp.o
[ 78%] Building CXX object PX4-Autopilot/src/lib/cdev/test/CMakeFiles/lib__cdev__test__cdev_test.dir/cdevtest_start.cpp.o
[ 78%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_perf.c.o
[ 78%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_ppm.cpp.o
[ 78%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libexamples__rover_steering_control.a
[ 78%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/liblib__cdev__test__cdev_test.a
[ 78%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_ppm_loopback.c.o
[ 78%] Built target examples__rover_steering_control
Scanning dependencies of target drivers_gyroscope
[ 78%] Built target lib__cdev__test__cdev_test
Scanning dependencies of target drivers_magnetometer
[ 78%] Building CXX object PX4-Autopilot/src/lib/drivers/gyroscope/CMakeFiles/drivers_gyroscope.dir/PX4Gyroscope.cpp.o
[ 78%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_rc.c.o
[ 78%] Building CXX object PX4-Autopilot/src/lib/drivers/magnetometer/CMakeFiles/drivers_magnetometer.dir/PX4Magnetometer.cpp.o
[ 78%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libexamples__work_item.a
[ 78%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers_accelerometer.a
[ 78%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_search_min.cpp.o
[ 78%] Built target examples__work_item
[ 78%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_sleep.c.o
Scanning dependencies of target SlewRate
[ 78%] Built target drivers_accelerometer
[ 78%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_uart_baudchange.c.o
[ 78%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_uart_console.c.o
[ 78%] Building CXX object PX4-Autopilot/src/lib/slew_rate/CMakeFiles/SlewRate.dir/dummy.cpp.o
[ 78%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_uart_send.c.o
[ 79%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_uart_loopback.c.o
[ 79%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libavoidance.a
[ 79%] Building CXX object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_versioning.cpp.o
[ 79%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libSlewRate.a
[ 79%] Built target avoidance
[ 79%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/tests_main.c.o
[ 79%] Building C object PX4-Autopilot/src/systemcmds/tests/CMakeFiles/systemcmds__tests.dir/test_cli.c.o
[ 79%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/liblib__controllib__controllib_test.a
Scanning dependencies of target drivers__pwm_out_sim
[ 79%] Built target SlewRate
[ 79%] Building CXX object PX4-Autopilot/src/drivers/pwm_out_sim/CMakeFiles/drivers__pwm_out_sim.dir/PWMSim.cpp.o
[ 79%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers_magnetometer.a
[ 79%] Built target lib__controllib__controllib_test
Scanning dependencies of target PreFlightCheck
Scanning dependencies of target modules__ekf2
Scanning dependencies of target FlightTaskUtility
Scanning dependencies of target FlightTaskDescend
[ 79%] Built target drivers_magnetometer
[ 79%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Descend/CMakeFiles/FlightTaskDescend.dir/FlightTaskDescend.cpp.o
Scanning dependencies of target FlightTaskFailsafe
[ 79%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Utility/CMakeFiles/FlightTaskUtility.dir/StraightLine.cpp.o
Scanning dependencies of target modules__fw_pos_control_l1
[ 79%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers_gyroscope.a
Scanning dependencies of target FlightTaskTransition
[ 80%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/PreFlightCheck.cpp.o
[ 82%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/airspeed_fusion.cpp.o
[ 83%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Transition/CMakeFiles/FlightTaskTransition.dir/FlightTaskTransition.cpp.o
[ 83%] Built target drivers_gyroscope
[ 83%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Failsafe/CMakeFiles/FlightTaskFailsafe.dir/FlightTaskFailsafe.cpp.o
[ 83%] Building CXX object PX4-Autopilot/src/modules/fw_pos_control_l1/CMakeFiles/modules__fw_pos_control_l1.dir/FixedwingPositionControl.cpp.o
[ 83%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Utility/CMakeFiles/FlightTaskUtility.dir/ManualVelocitySmoothingXY.cpp.o
Scanning dependencies of target modules__mc_att_control
[ 83%] Building CXX object PX4-Autopilot/src/modules/mc_att_control/CMakeFiles/modules__mc_att_control.dir/mc_att_control_main.cpp.o
Scanning dependencies of target modules__mc_hover_thrust_estimator
[ 83%] Building CXX object PX4-Autopilot/src/modules/mc_hover_thrust_estimator/CMakeFiles/modules__mc_hover_thrust_estimator.dir/MulticopterHoverThrustEstimator.cpp.o
Scanning dependencies of target modules__mc_pos_control
[ 83%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Utility/CMakeFiles/FlightTaskUtility.dir/ManualVelocitySmoothingZ.cpp.o
[ 83%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/baro_bias_estimator.cpp.o
[ 84%] Building CXX object PX4-Autopilot/src/modules/mc_pos_control/CMakeFiles/modules__mc_pos_control.dir/MulticopterPositionControl.cpp.o
[ 84%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskDescend.a
[ 84%] Built target FlightTaskDescend
Scanning dependencies of target modules__mc_rate_control
[ 84%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/control.cpp.o
[ 84%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskTransition.a
[ 84%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/preArmCheck.cpp.o
[ 84%] Building CXX object PX4-Autopilot/src/modules/mc_rate_control/CMakeFiles/modules__mc_rate_control.dir/MulticopterRateControl.cpp.o
[ 84%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Utility/CMakeFiles/FlightTaskUtility.dir/Sticks.cpp.o
[ 84%] Built target FlightTaskTransition
[ 84%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskFailsafe.a
[ 84%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libdrivers__pwm_out_sim.a
[ 84%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Utility/CMakeFiles/FlightTaskUtility.dir/StickAccelerationXY.cpp.o
[ 84%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/magnetometerCheck.cpp.o
[ 84%] Built target drivers__pwm_out_sim
[ 84%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/magConsistencyCheck.cpp.o
[ 84%] Built target FlightTaskFailsafe
[ 84%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/covariance.cpp.o
[ 84%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Utility/CMakeFiles/FlightTaskUtility.dir/StickYaw.cpp.o
[ 84%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__mc_hover_thrust_estimator.a
[ 84%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/drag_fusion.cpp.o
[ 84%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/ekf.cpp.o
[ 84%] Built target modules__mc_hover_thrust_estimator
[ 84%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/accelerometerCheck.cpp.o
[ 84%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskUtility.a
[ 84%] Built target FlightTaskUtility
Scanning dependencies of target modules__navigator
[ 84%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__mc_att_control.a
[ 84%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/gyroCheck.cpp.o
[ 84%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/navigator_main.cpp.o
[ 84%] Built target modules__mc_att_control
[ 84%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/baroCheck.cpp.o
[ 84%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__mc_rate_control.a
[ 84%] Built target modules__mc_rate_control
[ 84%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__mc_pos_control.a
[ 84%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/ekf_helper.cpp.o
Scanning dependencies of target modules__sensors
[ 84%] Built target modules__mc_pos_control
Scanning dependencies of target modules__simulator
[ 85%] Building CXX object PX4-Autopilot/src/modules/sensors/CMakeFiles/modules__sensors.dir/voted_sensors_update.cpp.o
[ 85%] Building CXX object PX4-Autopilot/src/modules/simulator/CMakeFiles/modules__simulator.dir/simulator.cpp.o
Scanning dependencies of target modules__fake_imu
[ 85%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/imuConsistencyCheck.cpp.o
Scanning dependencies of target examples__fake_magnetometer
[ 85%] Building CXX object PX4-Autopilot/src/examples/fake_imu/CMakeFiles/modules__fake_imu.dir/FakeImu.cpp.o
[ 86%] Building CXX object PX4-Autopilot/src/examples/fake_magnetometer/CMakeFiles/examples__fake_magnetometer.dir/FakeMagnetometer.cpp.o
[ 86%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__fw_pos_control_l1.a
[ 86%] Building CXX object PX4-Autopilot/src/modules/simulator/CMakeFiles/modules__simulator.dir/simulator_mavlink.cpp.o
[ 86%] Built target modules__fw_pos_control_l1
[ 86%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/EKFGSF_yaw.cpp.o
[ 86%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libsystemcmds__tests.a
[ 86%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/airspeedCheck.cpp.o
[ 87%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/rcCalibrationCheck.cpp.o
[ 87%] Built target systemcmds__tests
[ 87%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/estimator_interface.cpp.o
[ 87%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/powerCheck.cpp.o
[ 87%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__fake_imu.a
[ 87%] Building CXX object PX4-Autopilot/src/modules/sensors/CMakeFiles/modules__sensors.dir/sensors.cpp.o
[ 87%] Built target modules__fake_imu
[ 87%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/airframeCheck.cpp.o
[ 87%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libexamples__fake_magnetometer.a
[ 87%] Built target examples__fake_magnetometer
Scanning dependencies of target FlightTaskAuto
[ 87%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/ekf2Check.cpp.o
[ 87%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Auto/CMakeFiles/FlightTaskAuto.dir/FlightTaskAuto.cpp.o
[ 87%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/failureDetectorCheck.cpp.o
[ 87%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/navigator_mode.cpp.o
[ 87%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/manualControlCheck.cpp.o
[ 87%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/mission_block.cpp.o
[ 88%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/gps_checks.cpp.o
[ 88%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/cpuResourceCheck.cpp.o
[ 88%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/gps_yaw_fusion.cpp.o
[ 88%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/imu_down_sampler.cpp.o
[ 88%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/mag_control.cpp.o
[ 88%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/mission.cpp.o
[ 88%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/mag_fusion.cpp.o
[ 88%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/optflow_fusion.cpp.o
Scanning dependencies of target FlightTaskManualAltitude
[ 88%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/loiter.cpp.o
[ 88%] Building CXX object PX4-Autopilot/src/modules/commander/Arming/PreFlightCheck/CMakeFiles/PreFlightCheck.dir/checks/sdcardCheck.cpp.o
[ 88%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/ManualAltitude/CMakeFiles/FlightTaskManualAltitude.dir/FlightTaskManualAltitude.cpp.o
[ 88%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__sensors.a
[ 89%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/rtl.cpp.o
[ 89%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libPreFlightCheck.a
[ 89%] Built target modules__sensors
[ 89%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/takeoff.cpp.o
[ 89%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskAuto.a
[ 89%] Built target PreFlightCheck
Scanning dependencies of target modules__mavlink
[ 89%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/sensor_range_finder.cpp.o
[ 89%] Built target FlightTaskAuto
[ 89%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/sideslip_fusion.cpp.o
Scanning dependencies of target modules__commander
[ 91%] Building C object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink.c.o
[ 91%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/accelerometer_calibration.cpp.o
[ 91%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_command_sender.cpp.o
[ 91%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/terrain_estimator.cpp.o
[ 91%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_events.cpp.o
[ 92%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/utils.cpp.o
[ 92%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF/vel_pos_fusion.cpp.o
[ 92%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/land.cpp.o
[ 93%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskManualAltitude.a
[ 93%] Built target FlightTaskManualAltitude
Scanning dependencies of target FlightTaskAutoMapper
[ 93%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/precland.cpp.o
[ 94%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/AutoMapper/CMakeFiles/FlightTaskAutoMapper.dir/FlightTaskAutoMapper.cpp.o
[ 94%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_ftp.cpp.o
[ 94%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF2.cpp.o
[ 94%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_log_handler.cpp.o
[ 94%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/airspeed_calibration.cpp.o
[ 94%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__simulator.a
[ 94%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_main.cpp.o
[ 94%] Built target modules__simulator
[ 94%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_messages.cpp.o
[ 94%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_mission.cpp.o
[ 94%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/mission_feasibility_checker.cpp.o
Scanning dependencies of target FlightTaskAutoFollowMe
[ 94%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/AutoFollowMe/CMakeFiles/FlightTaskAutoFollowMe.dir/FlightTaskAutoFollowMe.cpp.o
[ 94%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskAutoMapper.a
[ 94%] Built target FlightTaskAutoMapper
[ 94%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_parameters.cpp.o
[ 94%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/calibration_routines.cpp.o
[ 94%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/geofence.cpp.o
[ 94%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/Commander.cpp.o
[ 94%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskAutoFollowMe.a
[ 94%] Built target FlightTaskAutoFollowMe
[ 95%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/commander_helper.cpp.o
Scanning dependencies of target FlightTaskManualAltitudeSmoothVel
[ 95%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/ManualAltitudeSmoothVel/CMakeFiles/FlightTaskManualAltitudeSmoothVel.dir/FlightTaskManualAltitudeSmoothVel.cpp.o
[ 95%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/esc_calibration.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_rate_limiter.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/enginefailure.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_receiver.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/gpsfailure.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_shell.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_simple_analyzer.cpp.o
[ 96%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskManualAltitudeSmoothVel.a
[ 96%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_stream.cpp.o
[ 96%] Built target FlightTaskManualAltitudeSmoothVel
Scanning dependencies of target FlightTaskManualPosition
[ 96%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/ManualPosition/CMakeFiles/FlightTaskManualPosition.dir/FlightTaskManualPosition.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_timesync.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/navigator/CMakeFiles/modules__navigator.dir/follow_target.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/mavlink_ulog.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/mavlink/CMakeFiles/modules__mavlink.dir/tune_publisher.cpp.o
[ 96%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskManualPosition.a
Scanning dependencies of target FlightTaskOrbit
[ 96%] Built target FlightTaskManualPosition
[ 96%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/Orbit/CMakeFiles/FlightTaskOrbit.dir/FlightTaskOrbit.cpp.o
[ 96%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/factory_calibration_storage.cpp.o
Scanning dependencies of target FlightTaskAutoLineSmoothVel
[ 97%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__navigator.a
[ 97%] Building CXX object PX4-Autopilot/src/modules/ekf2/CMakeFiles/modules__ekf2.dir/EKF2Selector.cpp.o
[ 97%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/AutoLineSmoothVel/CMakeFiles/FlightTaskAutoLineSmoothVel.dir/FlightTaskAutoLineSmoothVel.cpp.o
[ 97%] Built target modules__navigator
[ 97%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/gyro_calibration.cpp.o
Scanning dependencies of target FlightTaskManualAcceleration
[ 97%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/ManualAcceleration/CMakeFiles/FlightTaskManualAcceleration.dir/FlightTaskManualAcceleration.cpp.o
Scanning dependencies of target FlightTaskManualPositionSmoothVel
[ 97%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/tasks/ManualPositionSmoothVel/CMakeFiles/FlightTaskManualPositionSmoothVel.dir/FlightTaskManualPositionSmoothVel.cpp.o
[ 97%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/level_calibration.cpp.o
[ 97%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskOrbit.a
[ 97%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskManualAcceleration.a
[ 97%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/lm_fit.cpp.o
[ 97%] Built target FlightTaskManualAcceleration
[ 97%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/mag_calibration.cpp.o
[ 97%] Built target FlightTaskOrbit
[ 97%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/ManualControl.cpp.o
[ 97%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/rc_calibration.cpp.o
[ 98%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/state_machine_helper.cpp.o
[ 98%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskAutoLineSmoothVel.a
[ 98%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libFlightTaskManualPositionSmoothVel.a
[ 98%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__ekf2.a
[ 98%] Built target FlightTaskAutoLineSmoothVel
[ 98%] Building CXX object PX4-Autopilot/src/modules/commander/CMakeFiles/modules__commander.dir/worker_thread.cpp.o
[ 98%] Built target FlightTaskManualPositionSmoothVel
Scanning dependencies of target modules__flight_mode_manager
[ 98%] Built target modules__ekf2
[ 98%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/CMakeFiles/modules__flight_mode_manager.dir/FlightTasks_generated.cpp.o
[ 98%] Building CXX object PX4-Autopilot/src/modules/flight_mode_manager/CMakeFiles/modules__flight_mode_manager.dir/FlightModeManager.cpp.o
[ 98%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__commander.a
[ 98%] Built target modules__commander
[ 98%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__flight_mode_manager.a
[ 98%] Linking CXX static library /home/swift/workspace/catkin_ws/devel/lib/libmodules__mavlink.a
[ 98%] Built target modules__flight_mode_manager
[ 98%] Built target modules__mavlink
Scanning dependencies of target px4
[100%] Building CXX object PX4-Autopilot/platforms/posix/CMakeFiles/px4.dir/apps.cpp.o
[100%] Building CXX object PX4-Autopilot/platforms/posix/CMakeFiles/px4.dir/src/px4/common/main.cpp.o
[100%] Linking CXX executable /home/swift/workspace/catkin_ws/devel/lib/px4/px4
[100%] Built target px4
Scanning dependencies of target examples__dyn_hello
[100%] Building CXX object PX4-Autopilot/src/examples/dyn_hello/CMakeFiles/examples__dyn_hello.dir/hello.cpp.o
[100%] Linking CXX shared library /home/swift/workspace/catkin_ws/devel/lib/examples__dyn_hello.px4mod
[100%] Built target examples__dyn_hello
swift@swift-System-Product-Name:~/workspace/catkin_ws$
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot$ make px4_sitl list_vmd_make_targets | grep gazebo
none,none_believer,none_boat,none_cloudship,none_if750a,none_iris,none_iris_ctrlalloc,none_iris_dual_gps,none_iris_foggy_lidar,none_iris_irlock,none_iris_obs_avoid,none_iris_opt_flow,none_iris_opt_flow_mockup,none_iris_rplidar,none_iris_vision,none_nxp_cupcar,none_plane,none_plane_cam,none_plane_catapult,none_plane_lidar,none_px4vision,none_r1_rover,none_rover,none_shell,none_solo,none_standard_vtol,none_standard_vtol_drop,none_tailsitter,none_techpod,none_tiltrotor,none_typhoon_h480,none_uuv_bluerov2_heavy,none_uuv_hippocampus,none___gdb,none_believer_gdb,none_boat_gdb,none_cloudship_gdb,none_if750a_gdb,none_iris_gdb,none_iris_ctrlalloc_gdb,none_iris_dual_gps_gdb,none_iris_foggy_lidar_gdb,none_iris_irlock_gdb,none_iris_obs_avoid_gdb,none_iris_opt_flow_gdb,none_iris_opt_flow_mockup_gdb,none_iris_rplidar_gdb,none_iris_vision_gdb,none_nxp_cupcar_gdb,none_plane_gdb,none_plane_cam_gdb,none_plane_catapult_gdb,none_plane_lidar_gdb,none_px4vision_gdb,none_r1_rover_gdb,none_rover_gdb,none_shell_gdb,none_solo_gdb,none_standard_vtol_gdb,none_standard_vtol_drop_gdb,none_tailsitter_gdb,none_techpod_gdb,none_tiltrotor_gdb,none_typhoon_h480_gdb,none_uuv_bluerov2_heavy_gdb,none_uuv_hippocampus_gdb,none___lldb,none_believer_lldb,none_boat_lldb,none_cloudship_lldb,none_if750a_lldb,none_iris_lldb,none_iris_ctrlalloc_lldb,none_iris_dual_gps_lldb,none_iris_foggy_lidar_lldb,none_iris_irlock_lldb,none_iris_obs_avoid_lldb,none_iris_opt_flow_lldb,none_iris_opt_flow_mockup_lldb,none_iris_rplidar_lldb,none_iris_vision_lldb,none_nxp_cupcar_lldb,none_plane_lldb,none_plane_cam_lldb,none_plane_catapult_lldb,none_plane_lidar_lldb,none_px4vision_lldb,none_r1_rover_lldb,none_rover_lldb,none_shell_lldb,none_solo_lldb,none_standard_vtol_lldb,none_standard_vtol_drop_lldb,none_tailsitter_lldb,none_techpod_lldb,none_tiltrotor_lldb,none_typhoon_h480_lldb,none_uuv_bluerov2_heavy_lldb,none_uuv_hippocampus_lldb,none___valgrind,none_believer_valgrind,none_boat_valgrind,none_cloudship_valgrind,none_if750a_valgrind,none_iris_valgrind,none_iris_ctrlalloc_valgrind,none_iris_dual_gps_valgrind,none_iris_foggy_lidar_valgrind,none_iris_irlock_valgrind,none_iris_obs_avoid_valgrind,none_iris_opt_flow_valgrind,none_iris_opt_flow_mockup_valgrind,none_iris_rplidar_valgrind,none_iris_vision_valgrind,none_nxp_cupcar_valgrind,none_plane_valgrind,none_plane_cam_valgrind,none_plane_catapult_valgrind,none_plane_lidar_valgrind,none_px4vision_valgrind,none_r1_rover_valgrind,none_rover_valgrind,none_shell_valgrind,none_solo_valgrind,none_standard_vtol_valgrind,none_standard_vtol_drop_valgrind,none_tailsitter_valgrind,none_techpod_valgrind,none_tiltrotor_valgrind,none_typhoon_h480_valgrind,none_uuv_bluerov2_heavy_valgrind,none_uuv_hippocampus_valgrind,none___callgrind,none_believer_callgrind,none_boat_callgrind,none_cloudship_callgrind,none_if750a_callgrind,none_iris_callgrind,none_iris_ctrlalloc_callgrind,none_iris_dual_gps_callgrind,none_iris_foggy_lidar_callgrind,none_iris_irlock_callgrind,none_iris_obs_avoid_callgrind,none_iris_opt_flow_callgrind,none_iris_opt_flow_mockup_callgrind,none_iris_rplidar_callgrind,none_iris_vision_callgrind,none_nxp_cupcar_callgrind,none_plane_callgrind,none_plane_cam_callgrind,none_plane_catapult_callgrind,none_plane_lidar_callgrind,none_px4vision_callgrind,none_r1_rover_callgrind,none_rover_callgrind,none_shell_callgrind,none_solo_callgrind,none_standard_vtol_callgrind,none_standard_vtol_drop_callgrind,none_tailsitter_callgrind,none_techpod_callgrind,none_tiltrotor_callgrind,none_typhoon_h480_callgrind,none_uuv_bluerov2_heavy_callgrind,none_uuv_hippocampus_callgrind,jmavsim,jmavsim_believer,jmavsim_boat,jmavsim_cloudship,jmavsim_if750a,jmavsim_iris,jmavsim_iris_ctrlalloc,jmavsim_iris_dual_gps,jmavsim_iris_foggy_lidar,jmavsim_iris_irlock,jmavsim_iris_obs_avoid,jmavsim_iris_opt_flow,jmavsim_iris_opt_flow_mockup,jmavsim_iris_rplidar,jmavsim_iris_vision,jmavsim_nxp_cupcar,jmavsim_plane,jmavsim_plane_cam,jmavsim_plane_catapult,jmavsim_plane_lidar,jmavsim_px4vision,jmavsim_r1_rover,jmavsim_rover,jmavsim_shell,jmavsim_solo,jmavsim_standard_vtol,jmavsim_standard_vtol_drop,jmavsim_tailsitter,jmavsim_techpod,jmavsim_tiltrotor,jmavsim_typhoon_h480,jmavsim_uuv_bluerov2_heavy,jmavsim_uuv_hippocampus,jmavsim___gdb,jmavsim_believer_gdb,jmavsim_boat_gdb,jmavsim_cloudship_gdb,jmavsim_if750a_gdb,jmavsim_iris_gdb,jmavsim_iris_ctrlalloc_gdb,jmavsim_iris_dual_gps_gdb,jmavsim_iris_foggy_lidar_gdb,jmavsim_iris_irlock_gdb,jmavsim_iris_obs_avoid_gdb,jmavsim_iris_opt_flow_gdb,jmavsim_iris_opt_flow_mockup_gdb,jmavsim_iris_rplidar_gdb,jmavsim_iris_vision_gdb,jmavsim_nxp_cupcar_gdb,jmavsim_plane_gdb,jmavsim_plane_cam_gdb,jmavsim_plane_catapult_gdb,jmavsim_plane_lidar_gdb,jmavsim_px4vision_gdb,jmavsim_r1_rover_gdb,jmavsim_rover_gdb,jmavsim_shell_gdb,jmavsim_solo_gdb,jmavsim_standard_vtol_gdb,jmavsim_standard_vtol_drop_gdb,jmavsim_tailsitter_gdb,jmavsim_techpod_gdb,jmavsim_tiltrotor_gdb,jmavsim_typhoon_h480_gdb,jmavsim_uuv_bluerov2_heavy_gdb,jmavsim_uuv_hippocampus_gdb,jmavsim___lldb,jmavsim_believer_lldb,jmavsim_boat_lldb,jmavsim_cloudship_lldb,jmavsim_if750a_lldb,jmavsim_iris_lldb,jmavsim_iris_ctrlalloc_lldb,jmavsim_iris_dual_gps_lldb,jmavsim_iris_foggy_lidar_lldb,jmavsim_iris_irlock_lldb,jmavsim_iris_obs_avoid_lldb,jmavsim_iris_opt_flow_lldb,jmavsim_iris_opt_flow_mockup_lldb,jmavsim_iris_rplidar_lldb,jmavsim_iris_vision_lldb,jmavsim_nxp_cupcar_lldb,jmavsim_plane_lldb,jmavsim_plane_cam_lldb,jmavsim_plane_catapult_lldb,jmavsim_plane_lidar_lldb,jmavsim_px4vision_lldb,jmavsim_r1_rover_lldb,jmavsim_rover_lldb,jmavsim_shell_lldb,jmavsim_solo_lldb,jmavsim_standard_vtol_lldb,jmavsim_standard_vtol_drop_lldb,jmavsim_tailsitter_lldb,jmavsim_techpod_lldb,jmavsim_tiltrotor_lldb,jmavsim_typhoon_h480_lldb,jmavsim_uuv_bluerov2_heavy_lldb,jmavsim_uuv_hippocampus_lldb,jmavsim___valgrind,jmavsim_believer_valgrind,jmavsim_boat_valgrind,jmavsim_cloudship_valgrind,jmavsim_if750a_valgrind,jmavsim_iris_valgrind,jmavsim_iris_ctrlalloc_valgrind,jmavsim_iris_dual_gps_valgrind,jmavsim_iris_foggy_lidar_valgrind,jmavsim_iris_irlock_valgrind,jmavsim_iris_obs_avoid_valgrind,jmavsim_iris_opt_flow_valgrind,jmavsim_iris_opt_flow_mockup_valgrind,jmavsim_iris_rplidar_valgrind,jmavsim_iris_vision_valgrind,jmavsim_nxp_cupcar_valgrind,jmavsim_plane_valgrind,jmavsim_plane_cam_valgrind,jmavsim_plane_catapult_valgrind,jmavsim_plane_lidar_valgrind,jmavsim_px4vision_valgrind,jmavsim_r1_rover_valgrind,jmavsim_rover_valgrind,jmavsim_shell_valgrind,jmavsim_solo_valgrind,jmavsim_standard_vtol_valgrind,jmavsim_standard_vtol_drop_valgrind,jmavsim_tailsitter_valgrind,jmavsim_techpod_valgrind,jmavsim_tiltrotor_valgrind,jmavsim_typhoon_h480_valgrind,jmavsim_uuv_bluerov2_heavy_valgrind,jmavsim_uuv_hippocampus_valgrind,jmavsim___callgrind,jmavsim_believer_callgrind,jmavsim_boat_callgrind,jmavsim_cloudship_callgrind,jmavsim_if750a_callgrind,jmavsim_iris_callgrind,jmavsim_iris_ctrlalloc_callgrind,jmavsim_iris_dual_gps_callgrind,jmavsim_iris_foggy_lidar_callgrind,jmavsim_iris_irlock_callgrind,jmavsim_iris_obs_avoid_callgrind,jmavsim_iris_opt_flow_callgrind,jmavsim_iris_opt_flow_mockup_callgrind,jmavsim_iris_rplidar_callgrind,jmavsim_iris_vision_callgrind,jmavsim_nxp_cupcar_callgrind,jmavsim_plane_callgrind,jmavsim_plane_cam_callgrind,jmavsim_plane_catapult_callgrind,jmavsim_plane_lidar_callgrind,jmavsim_px4vision_callgrind,jmavsim_r1_rover_callgrind,jmavsim_rover_callgrind,jmavsim_shell_callgrind,jmavsim_solo_callgrind,jmavsim_standard_vtol_callgrind,jmavsim_standard_vtol_drop_callgrind,jmavsim_tailsitter_callgrind,jmavsim_techpod_callgrind,jmavsim_tiltrotor_callgrind,jmavsim_typhoon_h480_callgrind,jmavsim_uuv_bluerov2_heavy_callgrind,jmavsim_uuv_hippocampus_callgrind,gazebo,gazebo___baylands,gazebo___empty,gazebo___ksql_airport,gazebo___mcmillan_airfield,gazebo___sonoma_raceway,gazebo___warehouse,gazebo___windy,gazebo___yosemite,gazebo_believer,gazebo_believer__baylands,gazebo_believer__empty,gazebo_believer__ksql_airport,gazebo_believer__mcmillan_airfield,gazebo_believer__sonoma_raceway,gazebo_believer__warehouse,gazebo_believer__windy,gazebo_believer__yosemite,gazebo_boat,gazebo_boat__baylands,gazebo_boat__empty,gazebo_boat__ksql_airport,gazebo_boat__mcmillan_airfield,gazebo_boat__sonoma_raceway,gazebo_boat__warehouse,gazebo_boat__windy,gazebo_boat__yosemite,gazebo_cloudship,gazebo_cloudship__baylands,gazebo_cloudship__empty,gazebo_cloudship__ksql_airport,gazebo_cloudship__mcmillan_airfield,gazebo_cloudship__sonoma_raceway,gazebo_cloudship__warehouse,gazebo_cloudship__windy,gazebo_cloudship__yosemite,gazebo_if750a,gazebo_if750a__baylands,gazebo_if750a__empty,gazebo_if750a__ksql_airport,gazebo_if750a__mcmillan_airfield,gazebo_if750a__sonoma_raceway,gazebo_if750a__warehouse,gazebo_if750a__windy,gazebo_if750a__yosemite,gazebo_iris,gazebo_iris__baylands,gazebo_iris__empty,gazebo_iris__ksql_airport,gazebo_iris__mcmillan_airfield,gazebo_iris__sonoma_raceway,gazebo_iris__warehouse,gazebo_iris__windy,gazebo_iris__yosemite,gazebo_iris_ctrlalloc,gazebo_iris_ctrlalloc__baylands,gazebo_iris_ctrlalloc__empty,gazebo_iris_ctrlalloc__ksql_airport,gazebo_iris_ctrlalloc__mcmillan_airfield,gazebo_iris_ctrlalloc__sonoma_raceway,gazebo_iris_ctrlalloc__warehouse,gazebo_iris_ctrlalloc__windy,gazebo_iris_ctrlalloc__yosemite,gazebo_iris_dual_gps,gazebo_iris_dual_gps__baylands,gazebo_iris_dual_gps__empty,gazebo_iris_dual_gps__ksql_airport,gazebo_iris_dual_gps__mcmillan_airfield,gazebo_iris_dual_gps__sonoma_raceway,gazebo_iris_dual_gps__warehouse,gazebo_iris_dual_gps__windy,gazebo_iris_dual_gps__yosemite,gazebo_iris_foggy_lidar,gazebo_iris_foggy_lidar__baylands,gazebo_iris_foggy_lidar__empty,gazebo_iris_foggy_lidar__ksql_airport,gazebo_iris_foggy_lidar__mcmillan_airfield,gazebo_iris_foggy_lidar__sonoma_raceway,gazebo_iris_foggy_lidar__warehouse,gazebo_iris_foggy_lidar__windy,gazebo_iris_foggy_lidar__yosemite,gazebo_iris_irlock,gazebo_iris_irlock__baylands,gazebo_iris_irlock__empty,gazebo_iris_irlock__ksql_airport,gazebo_iris_irlock__mcmillan_airfield,gazebo_iris_irlock__sonoma_raceway,gazebo_iris_irlock__warehouse,gazebo_iris_irlock__windy,gazebo_iris_irlock__yosemite,gazebo_iris_obs_avoid,gazebo_iris_obs_avoid__baylands,gazebo_iris_obs_avoid__empty,gazebo_iris_obs_avoid__ksql_airport,gazebo_iris_obs_avoid__mcmillan_airfield,gazebo_iris_obs_avoid__sonoma_raceway,gazebo_iris_obs_avoid__warehouse,gazebo_iris_obs_avoid__windy,gazebo_iris_obs_avoid__yosemite,gazebo_iris_opt_flow,gazebo_iris_opt_flow__baylands,gazebo_iris_opt_flow__empty,gazebo_iris_opt_flow__ksql_airport,gazebo_iris_opt_flow__mcmillan_airfield,gazebo_iris_opt_flow__sonoma_raceway,gazebo_iris_opt_flow__warehouse,gazebo_iris_opt_flow__windy,gazebo_iris_opt_flow__yosemite,gazebo_iris_opt_flow_mockup,gazebo_iris_opt_flow_mockup__baylands,gazebo_iris_opt_flow_mockup__empty,gazebo_iris_opt_flow_mockup__ksql_airport,gazebo_iris_opt_flow_mockup__mcmillan_airfield,gazebo_iris_opt_flow_mockup__sonoma_raceway,gazebo_iris_opt_flow_mockup__warehouse,gazebo_iris_opt_flow_mockup__windy,gazebo_iris_opt_flow_mockup__yosemite,gazebo_iris_rplidar,gazebo_iris_rplidar__baylands,gazebo_iris_rplidar__empty,gazebo_iris_rplidar__ksql_airport,gazebo_iris_rplidar__mcmillan_airfield,gazebo_iris_rplidar__sonoma_raceway,gazebo_iris_rplidar__warehouse,gazebo_iris_rplidar__windy,gazebo_iris_rplidar__yosemite,gazebo_iris_vision,gazebo_iris_vision__baylands,gazebo_iris_vision__empty,gazebo_iris_vision__ksql_airport,gazebo_iris_vision__mcmillan_airfield,gazebo_iris_vision__sonoma_raceway,gazebo_iris_vision__warehouse,gazebo_iris_vision__windy,gazebo_iris_vision__yosemite,gazebo_nxp_cupcar,gazebo_nxp_cupcar__baylands,gazebo_nxp_cupcar__empty,gazebo_nxp_cupcar__ksql_airport,gazebo_nxp_cupcar__mcmillan_airfield,gazebo_nxp_cupcar__sonoma_raceway,gazebo_nxp_cupcar__warehouse,gazebo_nxp_cupcar__windy,gazebo_nxp_cupcar__yosemite,gazebo_plane,gazebo_plane__baylands,gazebo_plane__empty,gazebo_plane__ksql_airport,gazebo_plane__mcmillan_airfield,gazebo_plane__sonoma_raceway,gazebo_plane__warehouse,gazebo_plane__windy,gazebo_plane__yosemite,gazebo_plane_cam,gazebo_plane_cam__baylands,gazebo_plane_cam__empty,gazebo_plane_cam__ksql_airport,gazebo_plane_cam__mcmillan_airfield,gazebo_plane_cam__sonoma_raceway,gazebo_plane_cam__warehouse,gazebo_plane_cam__windy,gazebo_plane_cam__yosemite,gazebo_plane_catapult,gazebo_plane_catapult__baylands,gazebo_plane_catapult__empty,gazebo_plane_catapult__ksql_airport,gazebo_plane_catapult__mcmillan_airfield,gazebo_plane_catapult__sonoma_raceway,gazebo_plane_catapult__warehouse,gazebo_plane_catapult__windy,gazebo_plane_catapult__yosemite,gazebo_plane_lidar,gazebo_plane_lidar__baylands,gazebo_plane_lidar__empty,gazebo_plane_lidar__ksql_airport,gazebo_plane_lidar__mcmillan_airfield,gazebo_plane_lidar__sonoma_raceway,gazebo_plane_lidar__warehouse,gazebo_plane_lidar__windy,gazebo_plane_lidar__yosemite,gazebo_px4vision,gazebo_px4vision__baylands,gazebo_px4vision__empty,gazebo_px4vision__ksql_airport,gazebo_px4vision__mcmillan_airfield,gazebo_px4vision__sonoma_raceway,gazebo_px4vision__warehouse,gazebo_px4vision__windy,gazebo_px4vision__yosemite,gazebo_r1_rover,gazebo_r1_rover__baylands,gazebo_r1_rover__empty,gazebo_r1_rover__ksql_airport,gazebo_r1_rover__mcmillan_airfield,gazebo_r1_rover__sonoma_raceway,gazebo_r1_rover__warehouse,gazebo_r1_rover__windy,gazebo_r1_rover__yosemite,gazebo_rover,gazebo_rover__baylands,gazebo_rover__empty,gazebo_rover__ksql_airport,gazebo_rover__mcmillan_airfield,gazebo_rover__sonoma_raceway,gazebo_rover__warehouse,gazebo_rover__windy,gazebo_rover__yosemite,gazebo_shell,gazebo_shell__baylands,gazebo_shell__empty,gazebo_shell__ksql_airport,gazebo_shell__mcmillan_airfield,gazebo_shell__sonoma_raceway,gazebo_shell__warehouse,gazebo_shell__windy,gazebo_shell__yosemite,gazebo_solo,gazebo_solo__baylands,gazebo_solo__empty,gazebo_solo__ksql_airport,gazebo_solo__mcmillan_airfield,gazebo_solo__sonoma_raceway,gazebo_solo__warehouse,gazebo_solo__windy,gazebo_solo__yosemite,gazebo_standard_vtol,gazebo_standard_vtol__baylands,gazebo_standard_vtol__empty,gazebo_standard_vtol__ksql_airport,gazebo_standard_vtol__mcmillan_airfield,gazebo_standard_vtol__sonoma_raceway,gazebo_standard_vtol__warehouse,gazebo_standard_vtol__windy,gazebo_standard_vtol__yosemite,gazebo_standard_vtol_drop,gazebo_standard_vtol_drop__baylands,gazebo_standard_vtol_drop__empty,gazebo_standard_vtol_drop__ksql_airport,gazebo_standard_vtol_drop__mcmillan_airfield,gazebo_standard_vtol_drop__sonoma_raceway,gazebo_standard_vtol_drop__warehouse,gazebo_standard_vtol_drop__windy,gazebo_standard_vtol_drop__yosemite,gazebo_tailsitter,gazebo_tailsitter__baylands,gazebo_tailsitter__empty,gazebo_tailsitter__ksql_airport,gazebo_tailsitter__mcmillan_airfield,gazebo_tailsitter__sonoma_raceway,gazebo_tailsitter__warehouse,gazebo_tailsitter__windy,gazebo_tailsitter__yosemite,gazebo_techpod,gazebo_techpod__baylands,gazebo_techpod__empty,gazebo_techpod__ksql_airport,gazebo_techpod__mcmillan_airfield,gazebo_techpod__sonoma_raceway,gazebo_techpod__warehouse,gazebo_techpod__windy,gazebo_techpod__yosemite,gazebo_tiltrotor,gazebo_tiltrotor__baylands,gazebo_tiltrotor__empty,gazebo_tiltrotor__ksql_airport,gazebo_tiltrotor__mcmillan_airfield,gazebo_tiltrotor__sonoma_raceway,gazebo_tiltrotor__warehouse,gazebo_tiltrotor__windy,gazebo_tiltrotor__yosemite,gazebo_typhoon_h480,gazebo_typhoon_h480__baylands,gazebo_typhoon_h480__empty,gazebo_typhoon_h480__ksql_airport,gazebo_typhoon_h480__mcmillan_airfield,gazebo_typhoon_h480__sonoma_raceway,gazebo_typhoon_h480__warehouse,gazebo_typhoon_h480__windy,gazebo_typhoon_h480__yosemite,gazebo_uuv_bluerov2_heavy,gazebo_uuv_bluerov2_heavy__baylands,gazebo_uuv_bluerov2_heavy__empty,gazebo_uuv_bluerov2_heavy__ksql_airport,gazebo_uuv_bluerov2_heavy__mcmillan_airfield,gazebo_uuv_bluerov2_heavy__sonoma_raceway,gazebo_uuv_bluerov2_heavy__warehouse,gazebo_uuv_bluerov2_heavy__windy,gazebo_uuv_bluerov2_heavy__yosemite,gazebo_uuv_hippocampus,gazebo_uuv_hippocampus__baylands,gazebo_uuv_hippocampus__empty,gazebo_uuv_hippocampus__ksql_airport,gazebo_uuv_hippocampus__mcmillan_airfield,gazebo_uuv_hippocampus__sonoma_raceway,gazebo_uuv_hippocampus__warehouse,gazebo_uuv_hippocampus__windy,gazebo_uuv_hippocampus__yosemite,gazebo___gdb,gazebo__gdb_baylands,gazebo__gdb_empty,gazebo__gdb_ksql_airport,gazebo__gdb_mcmillan_airfield,gazebo__gdb_sonoma_raceway,gazebo__gdb_warehouse,gazebo__gdb_windy,gazebo__gdb_yosemite,gazebo_believer_gdb,gazebo_believer_gdb_baylands,gazebo_believer_gdb_empty,gazebo_believer_gdb_ksql_airport,gazebo_believer_gdb_mcmillan_airfield,gazebo_believer_gdb_sonoma_raceway,gazebo_believer_gdb_warehouse,gazebo_believer_gdb_windy,gazebo_believer_gdb_yosemite,gazebo_boat_gdb,gazebo_boat_gdb_baylands,gazebo_boat_gdb_empty,gazebo_boat_gdb_ksql_airport,gazebo_boat_gdb_mcmillan_airfield,gazebo_boat_gdb_sonoma_raceway,gazebo_boat_gdb_warehouse,gazebo_boat_gdb_windy,gazebo_boat_gdb_yosemite,gazebo_cloudship_gdb,gazebo_cloudship_gdb_baylands,gazebo_cloudship_gdb_empty,gazebo_cloudship_gdb_ksql_airport,gazebo_cloudship_gdb_mcmillan_airfield,gazebo_cloudship_gdb_sonoma_raceway,gazebo_cloudship_gdb_warehouse,gazebo_cloudship_gdb_windy,gazebo_cloudship_gdb_yosemite,gazebo_if750a_gdb,gazebo_if750a_gdb_baylands,gazebo_if750a_gdb_empty,gazebo_if750a_gdb_ksql_airport,gazebo_if750a_gdb_mcmillan_airfield,gazebo_if750a_gdb_sonoma_raceway,gazebo_if750a_gdb_warehouse,gazebo_if750a_gdb_windy,gazebo_if750a_gdb_yosemite,gazebo_iris_gdb,gazebo_iris_gdb_baylands,gazebo_iris_gdb_empty,gazebo_iris_gdb_ksql_airport,gazebo_iris_gdb_mcmillan_airfield,gazebo_iris_gdb_sonoma_raceway,gazebo_iris_gdb_warehouse,gazebo_iris_gdb_windy,gazebo_iris_gdb_yosemite,gazebo_iris_ctrlalloc_gdb,gazebo_iris_ctrlalloc_gdb_baylands,gazebo_iris_ctrlalloc_gdb_empty,gazebo_iris_ctrlalloc_gdb_ksql_airport,gazebo_iris_ctrlalloc_gdb_mcmillan_airfield,gazebo_iris_ctrlalloc_gdb_sonoma_raceway,gazebo_iris_ctrlalloc_gdb_warehouse,gazebo_iris_ctrlalloc_gdb_windy,gazebo_iris_ctrlalloc_gdb_yosemite,gazebo_iris_dual_gps_gdb,gazebo_iris_dual_gps_gdb_baylands,gazebo_iris_dual_gps_gdb_empty,gazebo_iris_dual_gps_gdb_ksql_airport,gazebo_iris_dual_gps_gdb_mcmillan_airfield,gazebo_iris_dual_gps_gdb_sonoma_raceway,gazebo_iris_dual_gps_gdb_warehouse,gazebo_iris_dual_gps_gdb_windy,gazebo_iris_dual_gps_gdb_yosemite,gazebo_iris_foggy_lidar_gdb,gazebo_iris_foggy_lidar_gdb_baylands,gazebo_iris_foggy_lidar_gdb_empty,gazebo_iris_foggy_lidar_gdb_ksql_airport,gazebo_iris_foggy_lidar_gdb_mcmillan_airfield,gazebo_iris_foggy_lidar_gdb_sonoma_raceway,gazebo_iris_foggy_lidar_gdb_warehouse,gazebo_iris_foggy_lidar_gdb_windy,gazebo_iris_foggy_lidar_gdb_yosemite,gazebo_iris_irlock_gdb,gazebo_iris_irlock_gdb_baylands,gazebo_iris_irlock_gdb_empty,gazebo_iris_irlock_gdb_ksql_airport,gazebo_iris_irlock_gdb_mcmillan_airfield,gazebo_iris_irlock_gdb_sonoma_raceway,gazebo_iris_irlock_gdb_warehouse,gazebo_iris_irlock_gdb_windy,gazebo_iris_irlock_gdb_yosemite,gazebo_iris_obs_avoid_gdb,gazebo_iris_obs_avoid_gdb_baylands,gazebo_iris_obs_avoid_gdb_empty,gazebo_iris_obs_avoid_gdb_ksql_airport,gazebo_iris_obs_avoid_gdb_mcmillan_airfield,gazebo_iris_obs_avoid_gdb_sonoma_raceway,gazebo_iris_obs_avoid_gdb_warehouse,gazebo_iris_obs_avoid_gdb_windy,gazebo_iris_obs_avoid_gdb_yosemite,gazebo_iris_opt_flow_gdb,gazebo_iris_opt_flow_gdb_baylands,gazebo_iris_opt_flow_gdb_empty,gazebo_iris_opt_flow_gdb_ksql_airport,gazebo_iris_opt_flow_gdb_mcmillan_airfield,gazebo_iris_opt_flow_gdb_sonoma_raceway,gazebo_iris_opt_flow_gdb_warehouse,gazebo_iris_opt_flow_gdb_windy,gazebo_iris_opt_flow_gdb_yosemite,gazebo_iris_opt_flow_mockup_gdb,gazebo_iris_opt_flow_mockup_gdb_baylands,gazebo_iris_opt_flow_mockup_gdb_empty,gazebo_iris_opt_flow_mockup_gdb_ksql_airport,gazebo_iris_opt_flow_mockup_gdb_mcmillan_airfield,gazebo_iris_opt_flow_mockup_gdb_sonoma_raceway,gazebo_iris_opt_flow_mockup_gdb_warehouse,gazebo_iris_opt_flow_mockup_gdb_windy,gazebo_iris_opt_flow_mockup_gdb_yosemite,gazebo_iris_rplidar_gdb,gazebo_iris_rplidar_gdb_baylands,gazebo_iris_rplidar_gdb_empty,gazebo_iris_rplidar_gdb_ksql_airport,gazebo_iris_rplidar_gdb_mcmillan_airfield,gazebo_iris_rplidar_gdb_sonoma_raceway,gazebo_iris_rplidar_gdb_warehouse,gazebo_iris_rplidar_gdb_windy,gazebo_iris_rplidar_gdb_yosemite,gazebo_iris_vision_gdb,gazebo_iris_vision_gdb_baylands,gazebo_iris_vision_gdb_empty,gazebo_iris_vision_gdb_ksql_airport,gazebo_iris_vision_gdb_mcmillan_airfield,gazebo_iris_vision_gdb_sonoma_raceway,gazebo_iris_vision_gdb_warehouse,gazebo_iris_vision_gdb_windy,gazebo_iris_vision_gdb_yosemite,gazebo_nxp_cupcar_gdb,gazebo_nxp_cupcar_gdb_baylands,gazebo_nxp_cupcar_gdb_empty,gazebo_nxp_cupcar_gdb_ksql_airport,gazebo_nxp_cupcar_gdb_mcmillan_airfield,gazebo_nxp_cupcar_gdb_sonoma_raceway,gazebo_nxp_cupcar_gdb_warehouse,gazebo_nxp_cupcar_gdb_windy,gazebo_nxp_cupcar_gdb_yosemite,gazebo_plane_gdb,gazebo_plane_gdb_baylands,gazebo_plane_gdb_empty,gazebo_plane_gdb_ksql_airport,gazebo_plane_gdb_mcmillan_airfield,gazebo_plane_gdb_sonoma_raceway,gazebo_plane_gdb_warehouse,gazebo_plane_gdb_windy,gazebo_plane_gdb_yosemite,gazebo_plane_cam_gdb,gazebo_plane_cam_gdb_baylands,gazebo_plane_cam_gdb_empty,gazebo_plane_cam_gdb_ksql_airport,gazebo_plane_cam_gdb_mcmillan_airfield,gazebo_plane_cam_gdb_sonoma_raceway,gazebo_plane_cam_gdb_warehouse,gazebo_plane_cam_gdb_windy,gazebo_plane_cam_gdb_yosemite,gazebo_plane_catapult_gdb,gazebo_plane_catapult_gdb_baylands,gazebo_plane_catapult_gdb_empty,gazebo_plane_catapult_gdb_ksql_airport,gazebo_plane_catapult_gdb_mcmillan_airfield,gazebo_plane_catapult_gdb_sonoma_raceway,gazebo_plane_catapult_gdb_warehouse,gazebo_plane_catapult_gdb_windy,gazebo_plane_catapult_gdb_yosemite,gazebo_plane_lidar_gdb,gazebo_plane_lidar_gdb_baylands,gazebo_plane_lidar_gdb_empty,gazebo_plane_lidar_gdb_ksql_airport,gazebo_plane_lidar_gdb_mcmillan_airfield,gazebo_plane_lidar_gdb_sonoma_raceway,gazebo_plane_lidar_gdb_warehouse,gazebo_plane_lidar_gdb_windy,gazebo_plane_lidar_gdb_yosemite,gazebo_px4vision_gdb,gazebo_px4vision_gdb_baylands,gazebo_px4vision_gdb_empty,gazebo_px4vision_gdb_ksql_airport,gazebo_px4vision_gdb_mcmillan_airfield,gazebo_px4vision_gdb_sonoma_raceway,gazebo_px4vision_gdb_warehouse,gazebo_px4vision_gdb_windy,gazebo_px4vision_gdb_yosemite,gazebo_r1_rover_gdb,gazebo_r1_rover_gdb_baylands,gazebo_r1_rover_gdb_empty,gazebo_r1_rover_gdb_ksql_airport,gazebo_r1_rover_gdb_mcmillan_airfield,gazebo_r1_rover_gdb_sonoma_raceway,gazebo_r1_rover_gdb_warehouse,gazebo_r1_rover_gdb_windy,gazebo_r1_rover_gdb_yosemite,gazebo_rover_gdb,gazebo_rover_gdb_baylands,gazebo_rover_gdb_empty,gazebo_rover_gdb_ksql_airport,gazebo_rover_gdb_mcmillan_airfield,gazebo_rover_gdb_sonoma_raceway,gazebo_rover_gdb_warehouse,gazebo_rover_gdb_windy,gazebo_rover_gdb_yosemite,gazebo_shell_gdb,gazebo_shell_gdb_baylands,gazebo_shell_gdb_empty,gazebo_shell_gdb_ksql_airport,gazebo_shell_gdb_mcmillan_airfield,gazebo_shell_gdb_sonoma_raceway,gazebo_shell_gdb_warehouse,gazebo_shell_gdb_windy,gazebo_shell_gdb_yosemite,gazebo_solo_gdb,gazebo_solo_gdb_baylands,gazebo_solo_gdb_empty,gazebo_solo_gdb_ksql_airport,gazebo_solo_gdb_mcmillan_airfield,gazebo_solo_gdb_sonoma_raceway,gazebo_solo_gdb_warehouse,gazebo_solo_gdb_windy,gazebo_solo_gdb_yosemite,gazebo_standard_vtol_gdb,gazebo_standard_vtol_gdb_baylands,gazebo_standard_vtol_gdb_empty,gazebo_standard_vtol_gdb_ksql_airport,gazebo_standard_vtol_gdb_mcmillan_airfield,gazebo_standard_vtol_gdb_sonoma_raceway,gazebo_standard_vtol_gdb_warehouse,gazebo_standard_vtol_gdb_windy,gazebo_standard_vtol_gdb_yosemite,gazebo_standard_vtol_drop_gdb,gazebo_standard_vtol_drop_gdb_baylands,gazebo_standard_vtol_drop_gdb_empty,gazebo_standard_vtol_drop_gdb_ksql_airport,gazebo_standard_vtol_drop_gdb_mcmillan_airfield,gazebo_standard_vtol_drop_gdb_sonoma_raceway,gazebo_standard_vtol_drop_gdb_warehouse,gazebo_standard_vtol_drop_gdb_windy,gazebo_standard_vtol_drop_gdb_yosemite,gazebo_tailsitter_gdb,gazebo_tailsitter_gdb_baylands,gazebo_tailsitter_gdb_empty,gazebo_tailsitter_gdb_ksql_airport,gazebo_tailsitter_gdb_mcmillan_airfield,gazebo_tailsitter_gdb_sonoma_raceway,gazebo_tailsitter_gdb_warehouse,gazebo_tailsitter_gdb_windy,gazebo_tailsitter_gdb_yosemite,gazebo_techpod_gdb,gazebo_techpod_gdb_baylands,gazebo_techpod_gdb_empty,gazebo_techpod_gdb_ksql_airport,gazebo_techpod_gdb_mcmillan_airfield,gazebo_techpod_gdb_sonoma_raceway,gazebo_techpod_gdb_warehouse,gazebo_techpod_gdb_windy,gazebo_techpod_gdb_yosemite,gazebo_tiltrotor_gdb,gazebo_tiltrotor_gdb_baylands,gazebo_tiltrotor_gdb_empty,gazebo_tiltrotor_gdb_ksql_airport,gazebo_tiltrotor_gdb_mcmillan_airfield,gazebo_tiltrotor_gdb_sonoma_raceway,gazebo_tiltrotor_gdb_warehouse,gazebo_tiltrotor_gdb_windy,gazebo_tiltrotor_gdb_yosemite,gazebo_typhoon_h480_gdb,gazebo_typhoon_h480_gdb_baylands,gazebo_typhoon_h480_gdb_empty,gazebo_typhoon_h480_gdb_ksql_airport,gazebo_typhoon_h480_gdb_mcmillan_airfield,gazebo_typhoon_h480_gdb_sonoma_raceway,gazebo_typhoon_h480_gdb_warehouse,gazebo_typhoon_h480_gdb_windy,gazebo_typhoon_h480_gdb_yosemite,gazebo_uuv_bluerov2_heavy_gdb,gazebo_uuv_bluerov2_heavy_gdb_baylands,gazebo_uuv_bluerov2_heavy_gdb_empty,gazebo_uuv_bluerov2_heavy_gdb_ksql_airport,gazebo_uuv_bluerov2_heavy_gdb_mcmillan_airfield,gazebo_uuv_bluerov2_heavy_gdb_sonoma_raceway,gazebo_uuv_bluerov2_heavy_gdb_warehouse,gazebo_uuv_bluerov2_heavy_gdb_windy,gazebo_uuv_bluerov2_heavy_gdb_yosemite,gazebo_uuv_hippocampus_gdb,gazebo_uuv_hippocampus_gdb_baylands,gazebo_uuv_hippocampus_gdb_empty,gazebo_uuv_hippocampus_gdb_ksql_airport,gazebo_uuv_hippocampus_gdb_mcmillan_airfield,gazebo_uuv_hippocampus_gdb_sonoma_raceway,gazebo_uuv_hippocampus_gdb_warehouse,gazebo_uuv_hippocampus_gdb_windy,gazebo_uuv_hippocampus_gdb_yosemite,gazebo___lldb,gazebo__lldb_baylands,gazebo__lldb_empty,gazebo__lldb_ksql_airport,gazebo__lldb_mcmillan_airfield,gazebo__lldb_sonoma_raceway,gazebo__lldb_warehouse,gazebo__lldb_windy,gazebo__lldb_yosemite,gazebo_believer_lldb,gazebo_believer_lldb_baylands,gazebo_believer_lldb_empty,gazebo_believer_lldb_ksql_airport,gazebo_believer_lldb_mcmillan_airfield,gazebo_believer_lldb_sonoma_raceway,gazebo_believer_lldb_warehouse,gazebo_believer_lldb_windy,gazebo_believer_lldb_yosemite,gazebo_boat_lldb,gazebo_boat_lldb_baylands,gazebo_boat_lldb_empty,gazebo_boat_lldb_ksql_airport,gazebo_boat_lldb_mcmillan_airfield,gazebo_boat_lldb_sonoma_raceway,gazebo_boat_lldb_warehouse,gazebo_boat_lldb_windy,gazebo_boat_lldb_yosemite,gazebo_cloudship_lldb,gazebo_cloudship_lldb_baylands,gazebo_cloudship_lldb_empty,gazebo_cloudship_lldb_ksql_airport,gazebo_cloudship_lldb_mcmillan_airfield,gazebo_cloudship_lldb_sonoma_raceway,gazebo_cloudship_lldb_warehouse,gazebo_cloudship_lldb_windy,gazebo_cloudship_lldb_yosemite,gazebo_if750a_lldb,gazebo_if750a_lldb_baylands,gazebo_if750a_lldb_empty,gazebo_if750a_lldb_ksql_airport,gazebo_if750a_lldb_mcmillan_airfield,gazebo_if750a_lldb_sonoma_raceway,gazebo_if750a_lldb_warehouse,gazebo_if750a_lldb_windy,gazebo_if750a_lldb_yosemite,gazebo_iris_lldb,gazebo_iris_lldb_baylands,gazebo_iris_lldb_empty,gazebo_iris_lldb_ksql_airport,gazebo_iris_lldb_mcmillan_airfield,gazebo_iris_lldb_sonoma_raceway,gazebo_iris_lldb_warehouse,gazebo_iris_lldb_windy,gazebo_iris_lldb_yosemite,gazebo_iris_ctrlalloc_lldb,gazebo_iris_ctrlalloc_lldb_baylands,gazebo_iris_ctrlalloc_lldb_empty,gazebo_iris_ctrlalloc_lldb_ksql_airport,gazebo_iris_ctrlalloc_lldb_mcmillan_airfield,gazebo_iris_ctrlalloc_lldb_sonoma_raceway,gazebo_iris_ctrlalloc_lldb_warehouse,gazebo_iris_ctrlalloc_lldb_windy,gazebo_iris_ctrlalloc_lldb_yosemite,gazebo_iris_dual_gps_lldb,gazebo_iris_dual_gps_lldb_baylands,gazebo_iris_dual_gps_lldb_empty,gazebo_iris_dual_gps_lldb_ksql_airport,gazebo_iris_dual_gps_lldb_mcmillan_airfield,gazebo_iris_dual_gps_lldb_sonoma_raceway,gazebo_iris_dual_gps_lldb_warehouse,gazebo_iris_dual_gps_lldb_windy,gazebo_iris_dual_gps_lldb_yosemite,gazebo_iris_foggy_lidar_lldb,gazebo_iris_foggy_lidar_lldb_baylands,gazebo_iris_foggy_lidar_lldb_empty,gazebo_iris_foggy_lidar_lldb_ksql_airport,gazebo_iris_foggy_lidar_lldb_mcmillan_airfield,gazebo_iris_foggy_lidar_lldb_sonoma_raceway,gazebo_iris_foggy_lidar_lldb_warehouse,gazebo_iris_foggy_lidar_lldb_windy,gazebo_iris_foggy_lidar_lldb_yosemite,gazebo_iris_irlock_lldb,gazebo_iris_irlock_lldb_baylands,gazebo_iris_irlock_lldb_empty,gazebo_iris_irlock_lldb_ksql_airport,gazebo_iris_irlock_lldb_mcmillan_airfield,gazebo_iris_irlock_lldb_sonoma_raceway,gazebo_iris_irlock_lldb_warehouse,gazebo_iris_irlock_lldb_windy,gazebo_iris_irlock_lldb_yosemite,gazebo_iris_obs_avoid_lldb,gazebo_iris_obs_avoid_lldb_baylands,gazebo_iris_obs_avoid_lldb_empty,gazebo_iris_obs_avoid_lldb_ksql_airport,gazebo_iris_obs_avoid_lldb_mcmillan_airfield,gazebo_iris_obs_avoid_lldb_sonoma_raceway,gazebo_iris_obs_avoid_lldb_warehouse,gazebo_iris_obs_avoid_lldb_windy,gazebo_iris_obs_avoid_lldb_yosemite,gazebo_iris_opt_flow_lldb,gazebo_iris_opt_flow_lldb_baylands,gazebo_iris_opt_flow_lldb_empty,gazebo_iris_opt_flow_lldb_ksql_airport,gazebo_iris_opt_flow_lldb_mcmillan_airfield,gazebo_iris_opt_flow_lldb_sonoma_raceway,gazebo_iris_opt_flow_lldb_warehouse,gazebo_iris_opt_flow_lldb_windy,gazebo_iris_opt_flow_lldb_yosemite,gazebo_iris_opt_flow_mockup_lldb,gazebo_iris_opt_flow_mockup_lldb_baylands,gazebo_iris_opt_flow_mockup_lldb_empty,gazebo_iris_opt_flow_mockup_lldb_ksql_airport,gazebo_iris_opt_flow_mockup_lldb_mcmillan_airfield,gazebo_iris_opt_flow_mockup_lldb_sonoma_raceway,gazebo_iris_opt_flow_mockup_lldb_warehouse,gazebo_iris_opt_flow_mockup_lldb_windy,gazebo_iris_opt_flow_mockup_lldb_yosemite,gazebo_iris_rplidar_lldb,gazebo_iris_rplidar_lldb_baylands,gazebo_iris_rplidar_lldb_empty,gazebo_iris_rplidar_lldb_ksql_airport,gazebo_iris_rplidar_lldb_mcmillan_airfield,gazebo_iris_rplidar_lldb_sonoma_raceway,gazebo_iris_rplidar_lldb_warehouse,gazebo_iris_rplidar_lldb_windy,gazebo_iris_rplidar_lldb_yosemite,gazebo_iris_vision_lldb,gazebo_iris_vision_lldb_baylands,gazebo_iris_vision_lldb_empty,gazebo_iris_vision_lldb_ksql_airport,gazebo_iris_vision_lldb_mcmillan_airfield,gazebo_iris_vision_lldb_sonoma_raceway,gazebo_iris_vision_lldb_warehouse,gazebo_iris_vision_lldb_windy,gazebo_iris_vision_lldb_yosemite,gazebo_nxp_cupcar_lldb,gazebo_nxp_cupcar_lldb_baylands,gazebo_nxp_cupcar_lldb_empty,gazebo_nxp_cupcar_lldb_ksql_airport,gazebo_nxp_cupcar_lldb_mcmillan_airfield,gazebo_nxp_cupcar_lldb_sonoma_raceway,gazebo_nxp_cupcar_lldb_warehouse,gazebo_nxp_cupcar_lldb_windy,gazebo_nxp_cupcar_lldb_yosemite,gazebo_plane_lldb,gazebo_plane_lldb_baylands,gazebo_plane_lldb_empty,gazebo_plane_lldb_ksql_airport,gazebo_plane_lldb_mcmillan_airfield,gazebo_plane_lldb_sonoma_raceway,gazebo_plane_lldb_warehouse,gazebo_plane_lldb_windy,gazebo_plane_lldb_yosemite,gazebo_plane_cam_lldb,gazebo_plane_cam_lldb_baylands,gazebo_plane_cam_lldb_empty,gazebo_plane_cam_lldb_ksql_airport,gazebo_plane_cam_lldb_mcmillan_airfield,gazebo_plane_cam_lldb_sonoma_raceway,gazebo_plane_cam_lldb_warehouse,gazebo_plane_cam_lldb_windy,gazebo_plane_cam_lldb_yosemite,gazebo_plane_catapult_lldb,gazebo_plane_catapult_lldb_baylands,gazebo_plane_catapult_lldb_empty,gazebo_plane_catapult_lldb_ksql_airport,gazebo_plane_catapult_lldb_mcmillan_airfield,gazebo_plane_catapult_lldb_sonoma_raceway,gazebo_plane_catapult_lldb_warehouse,gazebo_plane_catapult_lldb_windy,gazebo_plane_catapult_lldb_yosemite,gazebo_plane_lidar_lldb,gazebo_plane_lidar_lldb_baylands,gazebo_plane_lidar_lldb_empty,gazebo_plane_lidar_lldb_ksql_airport,gazebo_plane_lidar_lldb_mcmillan_airfield,gazebo_plane_lidar_lldb_sonoma_raceway,gazebo_plane_lidar_lldb_warehouse,gazebo_plane_lidar_lldb_windy,gazebo_plane_lidar_lldb_yosemite,gazebo_px4vision_lldb,gazebo_px4vision_lldb_baylands,gazebo_px4vision_lldb_empty,gazebo_px4vision_lldb_ksql_airport,gazebo_px4vision_lldb_mcmillan_airfield,gazebo_px4vision_lldb_sonoma_raceway,gazebo_px4vision_lldb_warehouse,gazebo_px4vision_lldb_windy,gazebo_px4vision_lldb_yosemite,gazebo_r1_rover_lldb,gazebo_r1_rover_lldb_baylands,gazebo_r1_rover_lldb_empty,gazebo_r1_rover_lldb_ksql_airport,gazebo_r1_rover_lldb_mcmillan_airfield,gazebo_r1_rover_lldb_sonoma_raceway,gazebo_r1_rover_lldb_warehouse,gazebo_r1_rover_lldb_windy,gazebo_r1_rover_lldb_yosemite,gazebo_rover_lldb,gazebo_rover_lldb_baylands,gazebo_rover_lldb_empty,gazebo_rover_lldb_ksql_airport,gazebo_rover_lldb_mcmillan_airfield,gazebo_rover_lldb_sonoma_raceway,gazebo_rover_lldb_warehouse,gazebo_rover_lldb_windy,gazebo_rover_lldb_yosemite,gazebo_shell_lldb,gazebo_shell_lldb_baylands,gazebo_shell_lldb_empty,gazebo_shell_lldb_ksql_airport,gazebo_shell_lldb_mcmillan_airfield,gazebo_shell_lldb_sonoma_raceway,gazebo_shell_lldb_warehouse,gazebo_shell_lldb_windy,gazebo_shell_lldb_yosemite,gazebo_solo_lldb,gazebo_solo_lldb_baylands,gazebo_solo_lldb_empty,gazebo_solo_lldb_ksql_airport,gazebo_solo_lldb_mcmillan_airfield,gazebo_solo_lldb_sonoma_raceway,gazebo_solo_lldb_warehouse,gazebo_solo_lldb_windy,gazebo_solo_lldb_yosemite,gazebo_standard_vtol_lldb,gazebo_standard_vtol_lldb_baylands,gazebo_standard_vtol_lldb_empty,gazebo_standard_vtol_lldb_ksql_airport,gazebo_standard_vtol_lldb_mcmillan_airfield,gazebo_standard_vtol_lldb_sonoma_raceway,gazebo_standard_vtol_lldb_warehouse,gazebo_standard_vtol_lldb_windy,gazebo_standard_vtol_lldb_yosemite,gazebo_standard_vtol_drop_lldb,gazebo_standard_vtol_drop_lldb_baylands,gazebo_standard_vtol_drop_lldb_empty,gazebo_standard_vtol_drop_lldb_ksql_airport,gazebo_standard_vtol_drop_lldb_mcmillan_airfield,gazebo_standard_vtol_drop_lldb_sonoma_raceway,gazebo_standard_vtol_drop_lldb_warehouse,gazebo_standard_vtol_drop_lldb_windy,gazebo_standard_vtol_drop_lldb_yosemite,gazebo_tailsitter_lldb,gazebo_tailsitter_lldb_baylands,gazebo_tailsitter_lldb_empty,gazebo_tailsitter_lldb_ksql_airport,gazebo_tailsitter_lldb_mcmillan_airfield,gazebo_tailsitter_lldb_sonoma_raceway,gazebo_tailsitter_lldb_warehouse,gazebo_tailsitter_lldb_windy,gazebo_tailsitter_lldb_yosemite,gazebo_techpod_lldb,gazebo_techpod_lldb_baylands,gazebo_techpod_lldb_empty,gazebo_techpod_lldb_ksql_airport,gazebo_techpod_lldb_mcmillan_airfield,gazebo_techpod_lldb_sonoma_raceway,gazebo_techpod_lldb_warehouse,gazebo_techpod_lldb_windy,gazebo_techpod_lldb_yosemite,gazebo_tiltrotor_lldb,gazebo_tiltrotor_lldb_baylands,gazebo_tiltrotor_lldb_empty,gazebo_tiltrotor_lldb_ksql_airport,gazebo_tiltrotor_lldb_mcmillan_airfield,gazebo_tiltrotor_lldb_sonoma_raceway,gazebo_tiltrotor_lldb_warehouse,gazebo_tiltrotor_lldb_windy,gazebo_tiltrotor_lldb_yosemite,gazebo_typhoon_h480_lldb,gazebo_typhoon_h480_lldb_baylands,gazebo_typhoon_h480_lldb_empty,gazebo_typhoon_h480_lldb_ksql_airport,gazebo_typhoon_h480_lldb_mcmillan_airfield,gazebo_typhoon_h480_lldb_sonoma_raceway,gazebo_typhoon_h480_lldb_warehouse,gazebo_typhoon_h480_lldb_windy,gazebo_typhoon_h480_lldb_yosemite,gazebo_uuv_bluerov2_heavy_lldb,gazebo_uuv_bluerov2_heavy_lldb_baylands,gazebo_uuv_bluerov2_heavy_lldb_empty,gazebo_uuv_bluerov2_heavy_lldb_ksql_airport,gazebo_uuv_bluerov2_heavy_lldb_mcmillan_airfield,gazebo_uuv_bluerov2_heavy_lldb_sonoma_raceway,gazebo_uuv_bluerov2_heavy_lldb_warehouse,gazebo_uuv_bluerov2_heavy_lldb_windy,gazebo_uuv_bluerov2_heavy_lldb_yosemite,gazebo_uuv_hippocampus_lldb,gazebo_uuv_hippocampus_lldb_baylands,gazebo_uuv_hippocampus_lldb_empty,gazebo_uuv_hippocampus_lldb_ksql_airport,gazebo_uuv_hippocampus_lldb_mcmillan_airfield,gazebo_uuv_hippocampus_lldb_sonoma_raceway,gazebo_uuv_hippocampus_lldb_warehouse,gazebo_uuv_hippocampus_lldb_windy,gazebo_uuv_hippocampus_lldb_yosemite,gazebo___valgrind,gazebo__valgrind_baylands,gazebo__valgrind_empty,gazebo__valgrind_ksql_airport,gazebo__valgrind_mcmillan_airfield,gazebo__valgrind_sonoma_raceway,gazebo__valgrind_warehouse,gazebo__valgrind_windy,gazebo__valgrind_yosemite,gazebo_believer_valgrind,gazebo_believer_valgrind_baylands,gazebo_believer_valgrind_empty,gazebo_believer_valgrind_ksql_airport,gazebo_believer_valgrind_mcmillan_airfield,gazebo_believer_valgrind_sonoma_raceway,gazebo_believer_valgrind_warehouse,gazebo_believer_valgrind_windy,gazebo_believer_valgrind_yosemite,gazebo_boat_valgrind,gazebo_boat_valgrind_baylands,gazebo_boat_valgrind_empty,gazebo_boat_valgrind_ksql_airport,gazebo_boat_valgrind_mcmillan_airfield,gazebo_boat_valgrind_sonoma_raceway,gazebo_boat_valgrind_warehouse,gazebo_boat_valgrind_windy,gazebo_boat_valgrind_yosemite,gazebo_cloudship_valgrind,gazebo_cloudship_valgrind_baylands,gazebo_cloudship_valgrind_empty,gazebo_cloudship_valgrind_ksql_airport,gazebo_cloudship_valgrind_mcmillan_airfield,gazebo_cloudship_valgrind_sonoma_raceway,gazebo_cloudship_valgrind_warehouse,gazebo_cloudship_valgrind_windy,gazebo_cloudship_valgrind_yosemite,gazebo_if750a_valgrind,gazebo_if750a_valgrind_baylands,gazebo_if750a_valgrind_empty,gazebo_if750a_valgrind_ksql_airport,gazebo_if750a_valgrind_mcmillan_airfield,gazebo_if750a_valgrind_sonoma_raceway,gazebo_if750a_valgrind_warehouse,gazebo_if750a_valgrind_windy,gazebo_if750a_valgrind_yosemite,gazebo_iris_valgrind,gazebo_iris_valgrind_baylands,gazebo_iris_valgrind_empty,gazebo_iris_valgrind_ksql_airport,gazebo_iris_valgrind_mcmillan_airfield,gazebo_iris_valgrind_sonoma_raceway,gazebo_iris_valgrind_warehouse,gazebo_iris_valgrind_windy,gazebo_iris_valgrind_yosemite,gazebo_iris_ctrlalloc_valgrind,gazebo_iris_ctrlalloc_valgrind_baylands,gazebo_iris_ctrlalloc_valgrind_empty,gazebo_iris_ctrlalloc_valgrind_ksql_airport,gazebo_iris_ctrlalloc_valgrind_mcmillan_airfield,gazebo_iris_ctrlalloc_valgrind_sonoma_raceway,gazebo_iris_ctrlalloc_valgrind_warehouse,gazebo_iris_ctrlalloc_valgrind_windy,gazebo_iris_ctrlalloc_valgrind_yosemite,gazebo_iris_dual_gps_valgrind,gazebo_iris_dual_gps_valgrind_baylands,gazebo_iris_dual_gps_valgrind_empty,gazebo_iris_dual_gps_valgrind_ksql_airport,gazebo_iris_dual_gps_valgrind_mcmillan_airfield,gazebo_iris_dual_gps_valgrind_sonoma_raceway,gazebo_iris_dual_gps_valgrind_warehouse,gazebo_iris_dual_gps_valgrind_windy,gazebo_iris_dual_gps_valgrind_yosemite,gazebo_iris_foggy_lidar_valgrind,gazebo_iris_foggy_lidar_valgrind_baylands,gazebo_iris_foggy_lidar_valgrind_empty,gazebo_iris_foggy_lidar_valgrind_ksql_airport,gazebo_iris_foggy_lidar_valgrind_mcmillan_airfield,gazebo_iris_foggy_lidar_valgrind_sonoma_raceway,gazebo_iris_foggy_lidar_valgrind_warehouse,gazebo_iris_foggy_lidar_valgrind_windy,gazebo_iris_foggy_lidar_valgrind_yosemite,gazebo_iris_irlock_valgrind,gazebo_iris_irlock_valgrind_baylands,gazebo_iris_irlock_valgrind_empty,gazebo_iris_irlock_valgrind_ksql_airport,gazebo_iris_irlock_valgrind_mcmillan_airfield,gazebo_iris_irlock_valgrind_sonoma_raceway,gazebo_iris_irlock_valgrind_warehouse,gazebo_iris_irlock_valgrind_windy,gazebo_iris_irlock_valgrind_yosemite,gazebo_iris_obs_avoid_valgrind,gazebo_iris_obs_avoid_valgrind_baylands,gazebo_iris_obs_avoid_valgrind_empty,gazebo_iris_obs_avoid_valgrind_ksql_airport,gazebo_iris_obs_avoid_valgrind_mcmillan_airfield,gazebo_iris_obs_avoid_valgrind_sonoma_raceway,gazebo_iris_obs_avoid_valgrind_warehouse,gazebo_iris_obs_avoid_valgrind_windy,gazebo_iris_obs_avoid_valgrind_yosemite,gazebo_iris_opt_flow_valgrind,gazebo_iris_opt_flow_valgrind_baylands,gazebo_iris_opt_flow_valgrind_empty,gazebo_iris_opt_flow_valgrind_ksql_airport,gazebo_iris_opt_flow_valgrind_mcmillan_airfield,gazebo_iris_opt_flow_valgrind_sonoma_raceway,gazebo_iris_opt_flow_valgrind_warehouse,gazebo_iris_opt_flow_valgrind_windy,gazebo_iris_opt_flow_valgrind_yosemite,gazebo_iris_opt_flow_mockup_valgrind,gazebo_iris_opt_flow_mockup_valgrind_baylands,gazebo_iris_opt_flow_mockup_valgrind_empty,gazebo_iris_opt_flow_mockup_valgrind_ksql_airport,gazebo_iris_opt_flow_mockup_valgrind_mcmillan_airfield,gazebo_iris_opt_flow_mockup_valgrind_sonoma_raceway,gazebo_iris_opt_flow_mockup_valgrind_warehouse,gazebo_iris_opt_flow_mockup_valgrind_windy,gazebo_iris_opt_flow_mockup_valgrind_yosemite,gazebo_iris_rplidar_valgrind,gazebo_iris_rplidar_valgrind_baylands,gazebo_iris_rplidar_valgrind_empty,gazebo_iris_rplidar_valgrind_ksql_airport,gazebo_iris_rplidar_valgrind_mcmillan_airfield,gazebo_iris_rplidar_valgrind_sonoma_raceway,gazebo_iris_rplidar_valgrind_warehouse,gazebo_iris_rplidar_valgrind_windy,gazebo_iris_rplidar_valgrind_yosemite,gazebo_iris_vision_valgrind,gazebo_iris_vision_valgrind_baylands,gazebo_iris_vision_valgrind_empty,gazebo_iris_vision_valgrind_ksql_airport,gazebo_iris_vision_valgrind_mcmillan_airfield,gazebo_iris_vision_valgrind_sonoma_raceway,gazebo_iris_vision_valgrind_warehouse,gazebo_iris_vision_valgrind_windy,gazebo_iris_vision_valgrind_yosemite,gazebo_nxp_cupcar_valgrind,gazebo_nxp_cupcar_valgrind_baylands,gazebo_nxp_cupcar_valgrind_empty,gazebo_nxp_cupcar_valgrind_ksql_airport,gazebo_nxp_cupcar_valgrind_mcmillan_airfield,gazebo_nxp_cupcar_valgrind_sonoma_raceway,gazebo_nxp_cupcar_valgrind_warehouse,gazebo_nxp_cupcar_valgrind_windy,gazebo_nxp_cupcar_valgrind_yosemite,gazebo_plane_valgrind,gazebo_plane_valgrind_baylands,gazebo_plane_valgrind_empty,gazebo_plane_valgrind_ksql_airport,gazebo_plane_valgrind_mcmillan_airfield,gazebo_plane_valgrind_sonoma_raceway,gazebo_plane_valgrind_warehouse,gazebo_plane_valgrind_windy,gazebo_plane_valgrind_yosemite,gazebo_plane_cam_valgrind,gazebo_plane_cam_valgrind_baylands,gazebo_plane_cam_valgrind_empty,gazebo_plane_cam_valgrind_ksql_airport,gazebo_plane_cam_valgrind_mcmillan_airfield,gazebo_plane_cam_valgrind_sonoma_raceway,gazebo_plane_cam_valgrind_warehouse,gazebo_plane_cam_valgrind_windy,gazebo_plane_cam_valgrind_yosemite,gazebo_plane_catapult_valgrind,gazebo_plane_catapult_valgrind_baylands,gazebo_plane_catapult_valgrind_empty,gazebo_plane_catapult_valgrind_ksql_airport,gazebo_plane_catapult_valgrind_mcmillan_airfield,gazebo_plane_catapult_valgrind_sonoma_raceway,gazebo_plane_catapult_valgrind_warehouse,gazebo_plane_catapult_valgrind_windy,gazebo_plane_catapult_valgrind_yosemite,gazebo_plane_lidar_valgrind,gazebo_plane_lidar_valgrind_baylands,gazebo_plane_lidar_valgrind_empty,gazebo_plane_lidar_valgrind_ksql_airport,gazebo_plane_lidar_valgrind_mcmillan_airfield,gazebo_plane_lidar_valgrind_sonoma_raceway,gazebo_plane_lidar_valgrind_warehouse,gazebo_plane_lidar_valgrind_windy,gazebo_plane_lidar_valgrind_yosemite,gazebo_px4vision_valgrind,gazebo_px4vision_valgrind_baylands,gazebo_px4vision_valgrind_empty,gazebo_px4vision_valgrind_ksql_airport,gazebo_px4vision_valgrind_mcmillan_airfield,gazebo_px4vision_valgrind_sonoma_raceway,gazebo_px4vision_valgrind_warehouse,gazebo_px4vision_valgrind_windy,gazebo_px4vision_valgrind_yosemite,gazebo_r1_rover_valgrind,gazebo_r1_rover_valgrind_baylands,gazebo_r1_rover_valgrind_empty,gazebo_r1_rover_valgrind_ksql_airport,gazebo_r1_rover_valgrind_mcmillan_airfield,gazebo_r1_rover_valgrind_sonoma_raceway,gazebo_r1_rover_valgrind_warehouse,gazebo_r1_rover_valgrind_windy,gazebo_r1_rover_valgrind_yosemite,gazebo_rover_valgrind,gazebo_rover_valgrind_baylands,gazebo_rover_valgrind_empty,gazebo_rover_valgrind_ksql_airport,gazebo_rover_valgrind_mcmillan_airfield,gazebo_rover_valgrind_sonoma_raceway,gazebo_rover_valgrind_warehouse,gazebo_rover_valgrind_windy,gazebo_rover_valgrind_yosemite,gazebo_shell_valgrind,gazebo_shell_valgrind_baylands,gazebo_shell_valgrind_empty,gazebo_shell_valgrind_ksql_airport,gazebo_shell_valgrind_mcmillan_airfield,gazebo_shell_valgrind_sonoma_raceway,gazebo_shell_valgrind_warehouse,gazebo_shell_valgrind_windy,gazebo_shell_valgrind_yosemite,gazebo_solo_valgrind,gazebo_solo_valgrind_baylands,gazebo_solo_valgrind_empty,gazebo_solo_valgrind_ksql_airport,gazebo_solo_valgrind_mcmillan_airfield,gazebo_solo_valgrind_sonoma_raceway,gazebo_solo_valgrind_warehouse,gazebo_solo_valgrind_windy,gazebo_solo_valgrind_yosemite,gazebo_standard_vtol_valgrind,gazebo_standard_vtol_valgrind_baylands,gazebo_standard_vtol_valgrind_empty,gazebo_standard_vtol_valgrind_ksql_airport,gazebo_standard_vtol_valgrind_mcmillan_airfield,gazebo_standard_vtol_valgrind_sonoma_raceway,gazebo_standard_vtol_valgrind_warehouse,gazebo_standard_vtol_valgrind_windy,gazebo_standard_vtol_valgrind_yosemite,gazebo_standard_vtol_drop_valgrind,gazebo_standard_vtol_drop_valgrind_baylands,gazebo_standard_vtol_drop_valgrind_empty,gazebo_standard_vtol_drop_valgrind_ksql_airport,gazebo_standard_vtol_drop_valgrind_mcmillan_airfield,gazebo_standard_vtol_drop_valgrind_sonoma_raceway,gazebo_standard_vtol_drop_valgrind_warehouse,gazebo_standard_vtol_drop_valgrind_windy,gazebo_standard_vtol_drop_valgrind_yosemite,gazebo_tailsitter_valgrind,gazebo_tailsitter_valgrind_baylands,gazebo_tailsitter_valgrind_empty,gazebo_tailsitter_valgrind_ksql_airport,gazebo_tailsitter_valgrind_mcmillan_airfield,gazebo_tailsitter_valgrind_sonoma_raceway,gazebo_tailsitter_valgrind_warehouse,gazebo_tailsitter_valgrind_windy,gazebo_tailsitter_valgrind_yosemite,gazebo_techpod_valgrind,gazebo_techpod_valgrind_baylands,gazebo_techpod_valgrind_empty,gazebo_techpod_valgrind_ksql_airport,gazebo_techpod_valgrind_mcmillan_airfield,gazebo_techpod_valgrind_sonoma_raceway,gazebo_techpod_valgrind_warehouse,gazebo_techpod_valgrind_windy,gazebo_techpod_valgrind_yosemite,gazebo_tiltrotor_valgrind,gazebo_tiltrotor_valgrind_baylands,gazebo_tiltrotor_valgrind_empty,gazebo_tiltrotor_valgrind_ksql_airport,gazebo_tiltrotor_valgrind_mcmillan_airfield,gazebo_tiltrotor_valgrind_sonoma_raceway,gazebo_tiltrotor_valgrind_warehouse,gazebo_tiltrotor_valgrind_windy,gazebo_tiltrotor_valgrind_yosemite,gazebo_typhoon_h480_valgrind,gazebo_typhoon_h480_valgrind_baylands,gazebo_typhoon_h480_valgrind_empty,gazebo_typhoon_h480_valgrind_ksql_airport,gazebo_typhoon_h480_valgrind_mcmillan_airfield,gazebo_typhoon_h480_valgrind_sonoma_raceway,gazebo_typhoon_h480_valgrind_warehouse,gazebo_typhoon_h480_valgrind_windy,gazebo_typhoon_h480_valgrind_yosemite,gazebo_uuv_bluerov2_heavy_valgrind,gazebo_uuv_bluerov2_heavy_valgrind_baylands,gazebo_uuv_bluerov2_heavy_valgrind_empty,gazebo_uuv_bluerov2_heavy_valgrind_ksql_airport,gazebo_uuv_bluerov2_heavy_valgrind_mcmillan_airfield,gazebo_uuv_bluerov2_heavy_valgrind_sonoma_raceway,gazebo_uuv_bluerov2_heavy_valgrind_warehouse,gazebo_uuv_bluerov2_heavy_valgrind_windy,gazebo_uuv_bluerov2_heavy_valgrind_yosemite,gazebo_uuv_hippocampus_valgrind,gazebo_uuv_hippocampus_valgrind_baylands,gazebo_uuv_hippocampus_valgrind_empty,gazebo_uuv_hippocampus_valgrind_ksql_airport,gazebo_uuv_hippocampus_valgrind_mcmillan_airfield,gazebo_uuv_hippocampus_valgrind_sonoma_raceway,gazebo_uuv_hippocampus_valgrind_warehouse,gazebo_uuv_hippocampus_valgrind_windy,gazebo_uuv_hippocampus_valgrind_yosemite,gazebo___callgrind,gazebo__callgrind_baylands,gazebo__callgrind_empty,gazebo__callgrind_ksql_airport,gazebo__callgrind_mcmillan_airfield,gazebo__callgrind_sonoma_raceway,gazebo__callgrind_warehouse,gazebo__callgrind_windy,gazebo__callgrind_yosemite,gazebo_believer_callgrind,gazebo_believer_callgrind_baylands,gazebo_believer_callgrind_empty,gazebo_believer_callgrind_ksql_airport,gazebo_believer_callgrind_mcmillan_airfield,gazebo_believer_callgrind_sonoma_raceway,gazebo_believer_callgrind_warehouse,gazebo_believer_callgrind_windy,gazebo_believer_callgrind_yosemite,gazebo_boat_callgrind,gazebo_boat_callgrind_baylands,gazebo_boat_callgrind_empty,gazebo_boat_callgrind_ksql_airport,gazebo_boat_callgrind_mcmillan_airfield,gazebo_boat_callgrind_sonoma_raceway,gazebo_boat_callgrind_warehouse,gazebo_boat_callgrind_windy,gazebo_boat_callgrind_yosemite,gazebo_cloudship_callgrind,gazebo_cloudship_callgrind_baylands,gazebo_cloudship_callgrind_empty,gazebo_cloudship_callgrind_ksql_airport,gazebo_cloudship_callgrind_mcmillan_airfield,gazebo_cloudship_callgrind_sonoma_raceway,gazebo_cloudship_callgrind_warehouse,gazebo_cloudship_callgrind_windy,gazebo_cloudship_callgrind_yosemite,gazebo_if750a_callgrind,gazebo_if750a_callgrind_baylands,gazebo_if750a_callgrind_empty,gazebo_if750a_callgrind_ksql_airport,gazebo_if750a_callgrind_mcmillan_airfield,gazebo_if750a_callgrind_sonoma_raceway,gazebo_if750a_callgrind_warehouse,gazebo_if750a_callgrind_windy,gazebo_if750a_callgrind_yosemite,gazebo_iris_callgrind,gazebo_iris_callgrind_baylands,gazebo_iris_callgrind_empty,gazebo_iris_callgrind_ksql_airport,gazebo_iris_callgrind_mcmillan_airfield,gazebo_iris_callgrind_sonoma_raceway,gazebo_iris_callgrind_warehouse,gazebo_iris_callgrind_windy,gazebo_iris_callgrind_yosemite,gazebo_iris_ctrlalloc_callgrind,gazebo_iris_ctrlalloc_callgrind_baylands,gazebo_iris_ctrlalloc_callgrind_empty,gazebo_iris_ctrlalloc_callgrind_ksql_airport,gazebo_iris_ctrlalloc_callgrind_mcmillan_airfield,gazebo_iris_ctrlalloc_callgrind_sonoma_raceway,gazebo_iris_ctrlalloc_callgrind_warehouse,gazebo_iris_ctrlalloc_callgrind_windy,gazebo_iris_ctrlalloc_callgrind_yosemite,gazebo_iris_dual_gps_callgrind,gazebo_iris_dual_gps_callgrind_baylands,gazebo_iris_dual_gps_callgrind_empty,gazebo_iris_dual_gps_callgrind_ksql_airport,gazebo_iris_dual_gps_callgrind_mcmillan_airfield,gazebo_iris_dual_gps_callgrind_sonoma_raceway,gazebo_iris_dual_gps_callgrind_warehouse,gazebo_iris_dual_gps_callgrind_windy,gazebo_iris_dual_gps_callgrind_yosemite,gazebo_iris_foggy_lidar_callgrind,gazebo_iris_foggy_lidar_callgrind_baylands,gazebo_iris_foggy_lidar_callgrind_empty,gazebo_iris_foggy_lidar_callgrind_ksql_airport,gazebo_iris_foggy_lidar_callgrind_mcmillan_airfield,gazebo_iris_foggy_lidar_callgrind_sonoma_raceway,gazebo_iris_foggy_lidar_callgrind_warehouse,gazebo_iris_foggy_lidar_callgrind_windy,gazebo_iris_foggy_lidar_callgrind_yosemite,gazebo_iris_irlock_callgrind,gazebo_iris_irlock_callgrind_baylands,gazebo_iris_irlock_callgrind_empty,gazebo_iris_irlock_callgrind_ksql_airport,gazebo_iris_irlock_callgrind_mcmillan_airfield,gazebo_iris_irlock_callgrind_sonoma_raceway,gazebo_iris_irlock_callgrind_warehouse,gazebo_iris_irlock_callgrind_windy,gazebo_iris_irlock_callgrind_yosemite,gazebo_iris_obs_avoid_callgrind,gazebo_iris_obs_avoid_callgrind_baylands,gazebo_iris_obs_avoid_callgrind_empty,gazebo_iris_obs_avoid_callgrind_ksql_airport,gazebo_iris_obs_avoid_callgrind_mcmillan_airfield,gazebo_iris_obs_avoid_callgrind_sonoma_raceway,gazebo_iris_obs_avoid_callgrind_warehouse,gazebo_iris_obs_avoid_callgrind_windy,gazebo_iris_obs_avoid_callgrind_yosemite,gazebo_iris_opt_flow_callgrind,gazebo_iris_opt_flow_callgrind_baylands,gazebo_iris_opt_flow_callgrind_empty,gazebo_iris_opt_flow_callgrind_ksql_airport,gazebo_iris_opt_flow_callgrind_mcmillan_airfield,gazebo_iris_opt_flow_callgrind_sonoma_raceway,gazebo_iris_opt_flow_callgrind_warehouse,gazebo_iris_opt_flow_callgrind_windy,gazebo_iris_opt_flow_callgrind_yosemite,gazebo_iris_opt_flow_mockup_callgrind,gazebo_iris_opt_flow_mockup_callgrind_baylands,gazebo_iris_opt_flow_mockup_callgrind_empty,gazebo_iris_opt_flow_mockup_callgrind_ksql_airport,gazebo_iris_opt_flow_mockup_callgrind_mcmillan_airfield,gazebo_iris_opt_flow_mockup_callgrind_sonoma_raceway,gazebo_iris_opt_flow_mockup_callgrind_warehouse,gazebo_iris_opt_flow_mockup_callgrind_windy,gazebo_iris_opt_flow_mockup_callgrind_yosemite,gazebo_iris_rplidar_callgrind,gazebo_iris_rplidar_callgrind_baylands,gazebo_iris_rplidar_callgrind_empty,gazebo_iris_rplidar_callgrind_ksql_airport,gazebo_iris_rplidar_callgrind_mcmillan_airfield,gazebo_iris_rplidar_callgrind_sonoma_raceway,gazebo_iris_rplidar_callgrind_warehouse,gazebo_iris_rplidar_callgrind_windy,gazebo_iris_rplidar_callgrind_yosemite,gazebo_iris_vision_callgrind,gazebo_iris_vision_callgrind_baylands,gazebo_iris_vision_callgrind_empty,gazebo_iris_vision_callgrind_ksql_airport,gazebo_iris_vision_callgrind_mcmillan_airfield,gazebo_iris_vision_callgrind_sonoma_raceway,gazebo_iris_vision_callgrind_warehouse,gazebo_iris_vision_callgrind_windy,gazebo_iris_vision_callgrind_yosemite,gazebo_nxp_cupcar_callgrind,gazebo_nxp_cupcar_callgrind_baylands,gazebo_nxp_cupcar_callgrind_empty,gazebo_nxp_cupcar_callgrind_ksql_airport,gazebo_nxp_cupcar_callgrind_mcmillan_airfield,gazebo_nxp_cupcar_callgrind_sonoma_raceway,gazebo_nxp_cupcar_callgrind_warehouse,gazebo_nxp_cupcar_callgrind_windy,gazebo_nxp_cupcar_callgrind_yosemite,gazebo_plane_callgrind,gazebo_plane_callgrind_baylands,gazebo_plane_callgrind_empty,gazebo_plane_callgrind_ksql_airport,gazebo_plane_callgrind_mcmillan_airfield,gazebo_plane_callgrind_sonoma_raceway,gazebo_plane_callgrind_warehouse,gazebo_plane_callgrind_windy,gazebo_plane_callgrind_yosemite,gazebo_plane_cam_callgrind,gazebo_plane_cam_callgrind_baylands,gazebo_plane_cam_callgrind_empty,gazebo_plane_cam_callgrind_ksql_airport,gazebo_plane_cam_callgrind_mcmillan_airfield,gazebo_plane_cam_callgrind_sonoma_raceway,gazebo_plane_cam_callgrind_warehouse,gazebo_plane_cam_callgrind_windy,gazebo_plane_cam_callgrind_yosemite,gazebo_plane_catapult_callgrind,gazebo_plane_catapult_callgrind_baylands,gazebo_plane_catapult_callgrind_empty,gazebo_plane_catapult_callgrind_ksql_airport,gazebo_plane_catapult_callgrind_mcmillan_airfield,gazebo_plane_catapult_callgrind_sonoma_raceway,gazebo_plane_catapult_callgrind_warehouse,gazebo_plane_catapult_callgrind_windy,gazebo_plane_catapult_callgrind_yosemite,gazebo_plane_lidar_callgrind,gazebo_plane_lidar_callgrind_baylands,gazebo_plane_lidar_callgrind_empty,gazebo_plane_lidar_callgrind_ksql_airport,gazebo_plane_lidar_callgrind_mcmillan_airfield,gazebo_plane_lidar_callgrind_sonoma_raceway,gazebo_plane_lidar_callgrind_warehouse,gazebo_plane_lidar_callgrind_windy,gazebo_plane_lidar_callgrind_yosemite,gazebo_px4vision_callgrind,gazebo_px4vision_callgrind_baylands,gazebo_px4vision_callgrind_empty,gazebo_px4vision_callgrind_ksql_airport,gazebo_px4vision_callgrind_mcmillan_airfield,gazebo_px4vision_callgrind_sonoma_raceway,gazebo_px4vision_callgrind_warehouse,gazebo_px4vision_callgrind_windy,gazebo_px4vision_callgrind_yosemite,gazebo_r1_rover_callgrind,gazebo_r1_rover_callgrind_baylands,gazebo_r1_rover_callgrind_empty,gazebo_r1_rover_callgrind_ksql_airport,gazebo_r1_rover_callgrind_mcmillan_airfield,gazebo_r1_rover_callgrind_sonoma_raceway,gazebo_r1_rover_callgrind_warehouse,gazebo_r1_rover_callgrind_windy,gazebo_r1_rover_callgrind_yosemite,gazebo_rover_callgrind,gazebo_rover_callgrind_baylands,gazebo_rover_callgrind_empty,gazebo_rover_callgrind_ksql_airport,gazebo_rover_callgrind_mcmillan_airfield,gazebo_rover_callgrind_sonoma_raceway,gazebo_rover_callgrind_warehouse,gazebo_rover_callgrind_windy,gazebo_rover_callgrind_yosemite,gazebo_shell_callgrind,gazebo_shell_callgrind_baylands,gazebo_shell_callgrind_empty,gazebo_shell_callgrind_ksql_airport,gazebo_shell_callgrind_mcmillan_airfield,gazebo_shell_callgrind_sonoma_raceway,gazebo_shell_callgrind_warehouse,gazebo_shell_callgrind_windy,gazebo_shell_callgrind_yosemite,gazebo_solo_callgrind,gazebo_solo_callgrind_baylands,gazebo_solo_callgrind_empty,gazebo_solo_callgrind_ksql_airport,gazebo_solo_callgrind_mcmillan_airfield,gazebo_solo_callgrind_sonoma_raceway,gazebo_solo_callgrind_warehouse,gazebo_solo_callgrind_windy,gazebo_solo_callgrind_yosemite,gazebo_standard_vtol_callgrind,gazebo_standard_vtol_callgrind_baylands,gazebo_standard_vtol_callgrind_empty,gazebo_standard_vtol_callgrind_ksql_airport,gazebo_standard_vtol_callgrind_mcmillan_airfield,gazebo_standard_vtol_callgrind_sonoma_raceway,gazebo_standard_vtol_callgrind_warehouse,gazebo_standard_vtol_callgrind_windy,gazebo_standard_vtol_callgrind_yosemite,gazebo_standard_vtol_drop_callgrind,gazebo_standard_vtol_drop_callgrind_baylands,gazebo_standard_vtol_drop_callgrind_empty,gazebo_standard_vtol_drop_callgrind_ksql_airport,gazebo_standard_vtol_drop_callgrind_mcmillan_airfield,gazebo_standard_vtol_drop_callgrind_sonoma_raceway,gazebo_standard_vtol_drop_callgrind_warehouse,gazebo_standard_vtol_drop_callgrind_windy,gazebo_standard_vtol_drop_callgrind_yosemite,gazebo_tailsitter_callgrind,gazebo_tailsitter_callgrind_baylands,gazebo_tailsitter_callgrind_empty,gazebo_tailsitter_callgrind_ksql_airport,gazebo_tailsitter_callgrind_mcmillan_airfield,gazebo_tailsitter_callgrind_sonoma_raceway,gazebo_tailsitter_callgrind_warehouse,gazebo_tailsitter_callgrind_windy,gazebo_tailsitter_callgrind_yosemite,gazebo_techpod_callgrind,gazebo_techpod_callgrind_baylands,gazebo_techpod_callgrind_empty,gazebo_techpod_callgrind_ksql_airport,gazebo_techpod_callgrind_mcmillan_airfield,gazebo_techpod_callgrind_sonoma_raceway,gazebo_techpod_callgrind_warehouse,gazebo_techpod_callgrind_windy,gazebo_techpod_callgrind_yosemite,gazebo_tiltrotor_callgrind,gazebo_tiltrotor_callgrind_baylands,gazebo_tiltrotor_callgrind_empty,gazebo_tiltrotor_callgrind_ksql_airport,gazebo_tiltrotor_callgrind_mcmillan_airfield,gazebo_tiltrotor_callgrind_sonoma_raceway,gazebo_tiltrotor_callgrind_warehouse,gazebo_tiltrotor_callgrind_windy,gazebo_tiltrotor_callgrind_yosemite,gazebo_typhoon_h480_callgrind,gazebo_typhoon_h480_callgrind_baylands,gazebo_typhoon_h480_callgrind_empty,gazebo_typhoon_h480_callgrind_ksql_airport,gazebo_typhoon_h480_callgrind_mcmillan_airfield,gazebo_typhoon_h480_callgrind_sonoma_raceway,gazebo_typhoon_h480_callgrind_warehouse,gazebo_typhoon_h480_callgrind_windy,gazebo_typhoon_h480_callgrind_yosemite,gazebo_uuv_bluerov2_heavy_callgrind,gazebo_uuv_bluerov2_heavy_callgrind_baylands,gazebo_uuv_bluerov2_heavy_callgrind_empty,gazebo_uuv_bluerov2_heavy_callgrind_ksql_airport,gazebo_uuv_bluerov2_heavy_callgrind_mcmillan_airfield,gazebo_uuv_bluerov2_heavy_callgrind_sonoma_raceway,gazebo_uuv_bluerov2_heavy_callgrind_warehouse,gazebo_uuv_bluerov2_heavy_callgrind_windy,gazebo_uuv_bluerov2_heavy_callgrind_yosemite,gazebo_uuv_hippocampus_callgrind,gazebo_uuv_hippocampus_callgrind_baylands,gazebo_uuv_hippocampus_callgrind_empty,gazebo_uuv_hippocampus_callgrind_ksql_airport,gazebo_uuv_hippocampus_callgrind_mcmillan_airfield,gazebo_uuv_hippocampus_callgrind_sonoma_raceway,gazebo_uuv_hippocampus_callgrind_warehouse,gazebo_uuv_hippocampus_callgrind_windy,gazebo_uuv_hippocampus_callgrind_yosemite,ignition,ignition_believer,ignition_boat,ignition_cloudship,ignition_if750a,ignition_iris,ignition_iris_ctrlalloc,ignition_iris_dual_gps,ignition_iris_foggy_lidar,ignition_iris_irlock,ignition_iris_obs_avoid,ignition_iris_opt_flow,ignition_iris_opt_flow_mockup,ignition_iris_rplidar,ignition_iris_vision,ignition_nxp_cupcar,ignition_plane,ignition_plane_cam,ignition_plane_catapult,ignition_plane_lidar,ignition_px4vision,ignition_r1_rover,ignition_rover,ignition_shell,ignition_solo,ignition_standard_vtol,ignition_standard_vtol_drop,ignition_tailsitter,ignition_techpod,ignition_tiltrotor,ignition_typhoon_h480,ignition_uuv_bluerov2_heavy,ignition_uuv_hippocampus,ignition___gdb,ignition_believer_gdb,ignition_boat_gdb,ignition_cloudship_gdb,ignition_if750a_gdb,ignition_iris_gdb,ignition_iris_ctrlalloc_gdb,ignition_iris_dual_gps_gdb,ignition_iris_foggy_lidar_gdb,ignition_iris_irlock_gdb,ignition_iris_obs_avoid_gdb,ignition_iris_opt_flow_gdb,ignition_iris_opt_flow_mockup_gdb,ignition_iris_rplidar_gdb,ignition_iris_vision_gdb,ignition_nxp_cupcar_gdb,ignition_plane_gdb,ignition_plane_cam_gdb,ignition_plane_catapult_gdb,ignition_plane_lidar_gdb,ignition_px4vision_gdb,ignition_r1_rover_gdb,ignition_rover_gdb,ignition_shell_gdb,ignition_solo_gdb,ignition_standard_vtol_gdb,ignition_standard_vtol_drop_gdb,ignition_tailsitter_gdb,ignition_techpod_gdb,ignition_tiltrotor_gdb,ignition_typhoon_h480_gdb,ignition_uuv_bluerov2_heavy_gdb,ignition_uuv_hippocampus_gdb,ignition___lldb,ignition_believer_lldb,ignition_boat_lldb,ignition_cloudship_lldb,ignition_if750a_lldb,ignition_iris_lldb,ignition_iris_ctrlalloc_lldb,ignition_iris_dual_gps_lldb,ignition_iris_foggy_lidar_lldb,ignition_iris_irlock_lldb,ignition_iris_obs_avoid_lldb,ignition_iris_opt_flow_lldb,ignition_iris_opt_flow_mockup_lldb,ignition_iris_rplidar_lldb,ignition_iris_vision_lldb,ignition_nxp_cupcar_lldb,ignition_plane_lldb,ignition_plane_cam_lldb,ignition_plane_catapult_lldb,ignition_plane_lidar_lldb,ignition_px4vision_lldb,ignition_r1_rover_lldb,ignition_rover_lldb,ignition_shell_lldb,ignition_solo_lldb,ignition_standard_vtol_lldb,ignition_standard_vtol_drop_lldb,ignition_tailsitter_lldb,ignition_techpod_lldb,ignition_tiltrotor_lldb,ignition_typhoon_h480_lldb,ignition_uuv_bluerov2_heavy_lldb,ignition_uuv_hippocampus_lldb,ignition___valgrind,ignition_believer_valgrind,ignition_boat_valgrind,ignition_cloudship_valgrind,ignition_if750a_valgrind,ignition_iris_valgrind,ignition_iris_ctrlalloc_valgrind,ignition_iris_dual_gps_valgrind,ignition_iris_foggy_lidar_valgrind,ignition_iris_irlock_valgrind,ignition_iris_obs_avoid_valgrind,ignition_iris_opt_flow_valgrind,ignition_iris_opt_flow_mockup_valgrind,ignition_iris_rplidar_valgrind,ignition_iris_vision_valgrind,ignition_nxp_cupcar_valgrind,ignition_plane_valgrind,ignition_plane_cam_valgrind,ignition_plane_catapult_valgrind,ignition_plane_lidar_valgrind,ignition_px4vision_valgrind,ignition_r1_rover_valgrind,ignition_rover_valgrind,ignition_shell_valgrind,ignition_solo_valgrind,ignition_standard_vtol_valgrind,ignition_standard_vtol_drop_valgrind,ignition_tailsitter_valgrind,ignition_techpod_valgrind,ignition_tiltrotor_valgrind,ignition_typhoon_h480_valgrind,ignition_uuv_bluerov2_heavy_valgrind,ignition_uuv_hippocampus_valgrind,ignition___callgrind,ignition_believer_callgrind,ignition_boat_callgrind,ignition_cloudship_callgrind,ignition_if750a_callgrind,ignition_iris_callgrind,ignition_iris_ctrlalloc_callgrind,ignition_iris_dual_gps_callgrind,ignition_iris_foggy_lidar_callgrind,ignition_iris_irlock_callgrind,ignition_iris_obs_avoid_callgrind,ignition_iris_opt_flow_callgrind,ignition_iris_opt_flow_mockup_callgrind,ignition_iris_rplidar_callgrind,ignition_iris_vision_callgrind,ignition_nxp_cupcar_callgrind,ignition_plane_callgrind,ignition_plane_cam_callgrind,ignition_plane_catapult_callgrind,ignition_plane_lidar_callgrind,ignition_px4vision_callgrind,ignition_r1_rover_callgrind,ignition_rover_callgrind,ignition_shell_callgrind,ignition_solo_callgrind,ignition_standard_vtol_callgrind,ignition_standard_vtol_drop_callgrind,ignition_tailsitter_callgrind,ignition_techpod_callgrind,ignition_tiltrotor_callgrind,ignition_typhoon_h480_callgrind,ignition_uuv_bluerov2_heavy_callgrind,ignition_uuv_hippocampus_callgrind,jsbsim,jsbsim___LSZH,jsbsim_rascal,jsbsim_rascal__LSZH,jsbsim_quadrotor_x,jsbsim_quadrotor_x__LSZH,jsbsim_hexarotor_x,jsbsim_hexarotor_x__LSZH,jsbsim_malolo,jsbsim_malolo__LSZH,jsbsim__gdb_none,jsbsim___gdb_LSZH,jsbsim_rascal_gdb_none,jsbsim_rascal_gdb_LSZH,jsbsim_quadrotor_x_gdb_none,jsbsim_quadrotor_x_gdb_LSZH,jsbsim_hexarotor_x_gdb_none,jsbsim_hexarotor_x_gdb_LSZH,jsbsim_malolo_gdb_none,jsbsim_malolo_gdb_LSZH,jsbsim__lldb_none,jsbsim___lldb_LSZH,jsbsim_rascal_lldb_none,jsbsim_rascal_lldb_LSZH,jsbsim_quadrotor_x_lldb_none,jsbsim_quadrotor_x_lldb_LSZH,jsbsim_hexarotor_x_lldb_none,jsbsim_hexarotor_x_lldb_LSZH,jsbsim_malolo_lldb_none,jsbsim_malolo_lldb_LSZH,jsbsim__valgrind_none,jsbsim___valgrind_LSZH,jsbsim_rascal_valgrind_none,jsbsim_rascal_valgrind_LSZH,jsbsim_quadrotor_x_valgrind_none,jsbsim_quadrotor_x_valgrind_LSZH,jsbsim_hexarotor_x_valgrind_none,jsbsim_hexarotor_x_valgrind_LSZH,jsbsim_malolo_valgrind_none,jsbsim_malolo_valgrind_LSZH,jsbsim__callgrind_none,jsbsim___callgrind_LSZH,jsbsim_rascal_callgrind_none,jsbsim_rascal_callgrind_LSZH,jsbsim_quadrotor_x_callgrind_none,jsbsim_quadrotor_x_callgrind_LSZH,jsbsim_hexarotor_x_callgrind_none,jsbsim_hexarotor_x_callgrind_LSZH,jsbsim_malolo_callgrind_none,jsbsim_malolo_callgrind_LSZH
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot$
modudus_ros(failed)
$ source ~/workspace/catkin_ws/src/PX4-Autopilot/Tools/setup_gazebo.bash ~/workspace/catkin_ws/src/PX4-Autopilot ~/workspace/catkin_ws/src/PX4-Autopilot/build/px4_sitl_default
$ export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/workspace/catkin_ws/src/PX4-Autopilot
$ export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/workspace/catkin_ws/src/PX4-Autopilot/Tools/sitl_gazebo
$ roslaunch px4 posix_sitl.launch
$ roslaunch modudculab_ros ctrl_pos_gazebo.launch
$ rosrun mavros mavsafety arm
$ rosrun mavros mavsys mode -c OFFBOARD
MAVROS log 확인
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot/Tools$ rosrun mavros mavsafety arm
Request failed. Check mavros logs
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot/Tools$ rostopic echo -n1 /diagnostics | tee /tmp/diag.yml
header:
seq: 73
stamp:
secs: 1959
nsecs: 356000000
frame_id: ''
status:
-
level: 1
name: "mavros: FCU connection"
message: "not connected"
hardware_id: "udp://:14540@127.0.0.1:14557"
values:
-
key: "Received packets:"
value: "0"
-
key: "Dropped packets:"
value: "0"
-
key: "Buffer overruns:"
value: "0"
-
key: "Parse errors:"
value: "0"
-
key: "Rx sequence number:"
value: "0"
-
key: "Tx sequence number:"
value: "0"
-
key: "Rx total bytes:"
value: "0"
-
key: "Tx total bytes:"
value: "441424"
-
key: "Rx speed:"
value: "0.000000"
-
key: "Tx speed:"
value: "6500.000000"
-
level: 2
name: "mavros: GPS"
message: "No satellites"
hardware_id: "udp://:14540@127.0.0.1:14557"
values:
-
key: "Satellites visible"
value: "0"
-
key: "Fix type"
value: "0"
-
key: "EPH (m)"
value: "Unknown"
-
key: "EPV (m)"
value: "Unknown"
-
level: 2
name: "mavros: Heartbeat"
message: "No events recorded."
hardware_id: "udp://:14540@127.0.0.1:14557"
values:
-
key: "Heartbeats since startup"
value: "0"
-
key: "Frequency (Hz)"
value: "0.000000"
-
key: "Vehicle type"
value: "Generic micro air vehicle"
-
key: "Autopilot type"
value: "Generic autopilot"
-
key: "Mode"
value: ''
-
key: "System status"
value: "Uninit"
-
level: 0
name: "mavros: System"
message: "Normal"
hardware_id: "udp://:14540@127.0.0.1:14557"
values:
-
key: "Sensor present"
value: "0x00000000"
-
key: "Sensor enabled"
value: "0x00000000"
-
key: "Sensor health"
value: "0x00000000"
-
key: "CPU Load (%)"
value: "0.0"
-
key: "Drop rate (%)"
value: "0.0"
-
key: "Errors comm"
value: "0"
-
key: "Errors count #1"
value: "0"
-
key: "Errors count #2"
value: "0"
-
key: "Errors count #3"
value: "0"
-
key: "Errors count #4"
value: "0"
-
level: 2
name: "mavros: Battery"
message: "No data"
hardware_id: "udp://:14540@127.0.0.1:14557"
values:
-
key: "Voltage"
value: "-1.00"
-
key: "Current"
value: "0.0"
-
key: "Remaining"
value: "0.0"
---
결과 확인
첫번째 터미널에서 SITL을 빌드하고 Gazebo가 실행된다.
가제보가 실행되고 나면 mavros 및 외부 인터페이스 연결 대기 상태가 된다.
터미널을 두번 엔터치면 nuttX shell (pxh>) 이 나타난다. 여기서 commander check를 입력하여 기체가 prearm check가 정상인지 확인한다.
swift@swift-System-Product-Name:~/Desktop$ cs
swift@swift-System-Product-Name:~/workspace/catkin_ws/src$ cd PX4-Autopilot/
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot$
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot$
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot$ make px4_sitl_default gazebo
[ 0%] Built target events_header
[ 0%] Built target ver_gen
[ 0%] Built target git_gazebo
[ 0%] Built target parameters_xml
[ 0%] Built target flighttasks_generated
[ 0%] Built target generate_topic_listener
[ 0%] Built target drivers_board
[ 0%] Built target uorb_headers
[ 0%] Built target mixer_gen_6dof
[ 0%] Built target git_gps_devices
[ 0%] Built target git_mavlink_v2
[ 0%] Built target mixer_gen
[ 0%] Built target logs_symlink
[ 0%] Performing build step for 'sitl_gazebo'
[ 1%] Built target events_json
make[5]: warning: -j10 forced in submake: resetting jobserver mode.
[ 1%] Built target tinybson
[ 2%] Built target perf
[ 4%] Built target work_queue
[ 5%] Built target geo
[ 24%] Built target uorb_msgs
[ 24%] Built target MixerBase
[ 15%] Built target models_gen
[ 24%] Built target output_limit
[ 17%] Built target klt_feature_tracker
[ 20%] Built target std_msgs
[ 24%] Built target mav_msgs
[ 26%] Built target nav_msgs
[ 42%] Built target sensor_msgs
[ 25%] Built target rc
[ 46%] Built target physics_msgs
[ 25%] Built target version
[ 25%] Built target wind_estimator
[ 49%] Built target OpticalFlow
[ 25%] Built target component_general_json
[ 25%] Built target world_magnetic_model
[ 50%] Built target ForceVisual
[ 26%] Built target parameters
[ 51%] Built target gazebo_usv_dynamics_plugin
[ 26%] Built target AllocatedActuatorMixer
[ 26%] Built target HelicopterMixer
[ 53%] Built target gazebo_airship_dynamics_plugin
[ 55%] Built target gazebo_groundtruth_plugin
[ 56%] Built target gazebo_gps_plugin
[ 58%] Built target gazebo_airspeed_plugin
[ 59%] Built target gazebo_irlock_plugin
[ 60%] Built target gazebo_opticalflow_mockup_plugin
[ 61%] Built target gazebo_parachute_plugin
[ 64%] Built target gazebo_video_stream_widget
[ 26%] Built target SimpleMixer
[ 26%] Built target NullMixer
[ 27%] Built target MultirotorMixer
[ 66%] Built target gazebo_multirotor_base_plugin
[ 68%] Built target gazebo_lidar_plugin
[ 27%] Built target romfs_gen_files_target
[ 70%] Built target gazebo_opticalflow_plugin
[ 71%] Built target gazebo_wind_plugin
[ 72%] Built target gazebo_drop_plugin
[ 74%] Built target gazebo_vision_plugin
[ 76%] Built target gazebo_sonar_plugin
[ 77%] Built target gazebo_gst_camera_plugin
[ 79%] Built target gazebo_uuv_plugin
[ 27%] Built target mixer
[ 82%] Built target gazebo_user_camera_plugin
[ 29%] Built target px4_work_queue
[ 84%] Built target gazebo_controller_interface
[ 88%] Built target gazebo_gimbal_controller_plugin
[ 88%] Built target gazebo_imu_plugin
[ 30%] Built target uORB
[ 89%] Built target gazebo_motor_model
[ 92%] Built target gazebo_mavlink_interface
[ 93%] Built target gazebo_barometer_plugin
[ 95%] Built target gazebo_camera_manager_plugin
[ 97%] Built target LiftDragPlugin
[ 99%] Built target gazebo_magnetometer_plugin
[ 31%] Built target px4_platform
[100%] Built target gazebo_catapult_plugin
[ 31%] Built target lockstep_scheduler
[ 31%] No install step for 'sitl_gazebo'
[ 32%] Built target px4_daemon
[ 32%] Completed 'sitl_gazebo'
[ 33%] Built target px4_layer
[ 34%] Built target sitl_gazebo
[ 34%] Built target cdev
[ 34%] Built target hysteresis
[ 34%] Built target airspeed
[ 34%] Built target bezier
[ 34%] Built target battery
[ 35%] Built target circuit_breaker
[ 35%] Built target systemlib
[ 35%] Built target CollisionPrevention
[ 36%] Built target controllib
[ 36%] Built target conversion
[ 36%] Built target drivers__device
[ 36%] Built target l1
[ 36%] Built target drivers_barometer
[ 37%] Built target mathlib
[ 37%] Built target landing_slope
[ 37%] Built target motion_planning
[ 38%] Built target mixer_module
[ 38%] Built target lib__rc__rc_tests
[ 38%] Built target SlewRate
[ 38%] Built target pid
[ 38%] Built target sensor_calibration
[ 38%] Built target WeatherVane
[ 38%] Built target arch_tone_alarm
[ 38%] Built target tecs
[ 38%] Built target tunes
[ 39%] Built target lib__work_queue__test__wqueue_test
[ 40%] Built target drivers__camera_trigger
[ 40%] Built target drivers__camera_capture
[ 41%] Built target modules__uORB__uORB_tests
[ 43%] Built target examples__rpm_simulator
[ 44%] Built target drivers__gps
[ 45%] Built target drivers__pwm_out_sim
[ 45%] Built target drivers__tone_alarm
[ 45%] Built target modules__airship_att_control
[ 45%] Built target modules__attitude_estimator_q
[ 45%] Built target modules__airspeed_selector
[ 46%] Built target modules__camera_feedback
[ 46%] Built target HealthFlags
[ 46%] Built target ArmAuthorization
[ 46%] Built target failure_detector
[ 47%] Built target modules__commander__commander_tests
[ 48%] Built target modules__dataman
[ 48%] Built target EKF2Utility
[ 48%] Built target modules__events
[ 48%] Built target FlightTask
[ 49%] Built target runway_takeoff
[ 49%] Built target launchdetection
[ 49%] Built target modules__gyro_calibration
[ 50%] Built target modules__fw_att_control
[ 50%] Built target modules__landing_target_estimator
[ 52%] Built target modules__gyro_fft
[ 52%] Built target modules__load_mon
[ 53%] Built target modules__land_detector
[ 53%] Built target AttitudeControl
[ 53%] Built target modules__logger
[ 55%] Built target modules__local_position_estimator
[ 56%] Built target modules__mavlink__mavlink_tests
[ 58%] Built target zero_order_hover_thrust_ekf
[ 59%] Built target PositionControl
[ 60%] Built target Takeoff
[ 60%] Built target RateControl
[ 60%] Built target geofence_breach_avoidance
[ 60%] Built target modules__rc_update
[ 60%] Built target modules__replay
[ 60%] Built target modules__rover_pos_control
[ 61%] Built target data_validator
[ 62%] Built target vehicle_acceleration
[ 62%] Built target vehicle_angular_velocity
[ 62%] Built target vehicle_air_data
[ 62%] Built target vehicle_gps_position
[ 63%] Built target vehicle_imu
[ 63%] Built target vehicle_magnetometer
[ 63%] Built target modules__simulator__battery_simulator
[ 63%] Built target modules__uuv_att_control
[ 64%] Built target modules__temperature_compensation
[ 64%] Built target modules__uuv_pos_control
[ 65%] Built target drivers__vmount
[ 65%] Built target systemcmds__dyn
[ 66%] Built target modules__vtol_att_control
[ 66%] Built target systemcmds__esc_calib
[ 67%] Built target systemcmds__failure
[ 67%] Built target systemcmds__led_control
[ 67%] Built target systemcmds__mixer
[ 67%] Built target systemcmds__motor_test
[ 67%] Built target systemcmds__motor_ramp
[ 68%] Built target systemcmds__param
[ 68%] Built target systemcmds__perf
[ 68%] Built target systemcmds__sd_bench
[ 68%] Built target systemcmds__pwm
[ 69%] Built target systemcmds__shutdown
[ 69%] Built target systemcmds__system_time
[ 69%] Built target systemcmds__tests__hrt_test
[ 74%] Built target systemcmds__tests
[ 74%] Built target systemcmds__tune_control
[ 75%] Built target systemcmds__topic_listener
[ 75%] Built target systemcmds__uorb
[ 75%] Built target systemcmds__ver
[ 76%] Built target systemcmds__work_queue
[ 77%] Built target modules__fake_gps
[ 77%] Built target examples__fixedwing_control
[ 78%] Built target examples__hello
[ 78%] Built target examples__px4_mavlink_debug
[ 78%] Built target examples__px4_simple_app
[ 78%] Built target examples__rover_steering_control
[ 78%] Built target examples__uuv_example_app
[ 78%] Built target examples__work_item
[ 79%] Built target avoidance
[ 80%] Built target lib__cdev__test__cdev_test
[ 80%] Built target lib__controllib__controllib_test
[ 81%] Built target drivers_accelerometer
[ 82%] Built target drivers_gyroscope
[ 82%] Built target drivers_magnetometer
[ 84%] Built target PreFlightCheck
[ 86%] Built target FlightTaskUtility
[ 89%] Built target modules__ekf2
[ 89%] Built target FlightTaskDescend
[ 89%] Built target FlightTaskFailsafe
[ 89%] Built target FlightTaskTransition
[ 89%] Built target modules__fw_pos_control_l1
[ 89%] Built target modules__mc_att_control
[ 89%] Built target modules__mc_hover_thrust_estimator
[ 90%] Built target modules__mc_pos_control
[ 90%] Built target modules__mc_rate_control
[ 93%] Built target modules__sensors
[ 93%] Built target modules__mavlink
[ 95%] Built target modules__navigator
[ 95%] Built target modules__simulator
[ 95%] Built target examples__fake_magnetometer
[ 95%] Built target modules__fake_imu
[ 96%] Built target modules__commander
[ 96%] Built target FlightTaskAuto
[ 97%] Built target FlightTaskManualAltitude
[ 97%] Built target FlightTaskAutoFollowMe
[ 97%] Built target FlightTaskAutoMapper
[ 97%] Built target FlightTaskManualAltitudeSmoothVel
[ 97%] Built target FlightTaskManualPosition
[ 98%] Built target FlightTaskAutoLineSmoothVel
[ 98%] Built target FlightTaskManualPositionSmoothVel
[ 98%] Built target FlightTaskManualAcceleration
[100%] Built target FlightTaskOrbit
[100%] Built target modules__flight_mode_manager
[100%] Built target px4
SITL ARGS
sitl_bin: /home/swift/workspace/catkin_ws/src/PX4-Autopilot/build/px4_sitl_default/bin/px4
debugger: none
program: gazebo
model: none
world: none
src_path: /home/swift/workspace/catkin_ws/src/PX4-Autopilot
build_path: /home/swift/workspace/catkin_ws/src/PX4-Autopilot/build/px4_sitl_default
empty model, setting iris as default
GAZEBO_PLUGIN_PATH :/home/swift/workspace/catkin_ws/src/PX4-Autopilot/build/px4_sitl_default/build_gazebo:/home/swift/workspace/catkin_ws/src/PX4-Autopilot/build/px4_sitl_default/build_gazebo
GAZEBO_MODEL_PATH :/home/swift/workspace/catkin_ws/src/PX4-Autopilot/Tools/sitl_gazebo/models:/home/swift/workspace/catkin_ws/src/PX4-Autopilot/Tools/sitl_gazebo/models
LD_LIBRARY_PATH /home/swift/workspace/catkin_ws/devel/lib:/opt/ros/noetic/lib:/home/swift/workspace/catkin_ws/src/PX4-Autopilot/build/px4_sitl_default/build_gazebo:/home/swift/workspace/catkin_ws/src/PX4-Autopilot/build/px4_sitl_default/build_gazebo
empty world, setting empty.world as default
Using: /home/swift/workspace/catkin_ws/src/PX4-Autopilot/Tools/sitl_gazebo/models/iris/iris.sdf
SITL COMMAND: "/home/swift/workspace/catkin_ws/src/PX4-Autopilot/build/px4_sitl_default/bin/px4" "/home/swift/workspace/catkin_ws/src/PX4-Autopilot/build/px4_sitl_default"/etc -s etc/init.d-posix/rcS -t "/home/swift/workspace/catkin_ws/src/PX4-Autopilot"/test_data
Creating symlink /home/swift/workspace/catkin_ws/src/PX4-Autopilot/build/px4_sitl_default/etc -> /home/swift/workspace/
_____ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [px4] Calling startup script: /bin/sh etc/init.d-posix/rcS 0
INFO [init] found model autostart file as SYS_AUTOSTART=10016
INFO [param] selected parameter default file eeprom/parameters_10016
INFO [parameters] BSON document size 428 bytes, decoded 428 bytes
[param] Loaded: eeprom/parameters_10016
INFO [dataman] Unknown restart, data manager file './dataman' size is 11798680 bytes
PX4 SIM HOST: localhost
INFO [simulator] Waiting for simulator to accept connection on TCP port 4560
INFO [simulator] Simulator connected on TCP port 4560.
INFO [commander] LED: open /dev/led0 failed (22)
INFO [init] Mixer: etc/mixers/quad_w.main.mix on /dev/pwm_output0
INFO [mavlink] mode: Normal, data rate: 4000000 B/s on udp port 18570 remote port 14550
Gazebo multi-robot simulator, version 11.5.1
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org
[Msg] Waiting for master.
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 49.236.114.163
INFO [mavlink] mode: Onboard, data rate: 4000000 B/s on udp port 14580 remote port 14540
INFO [mavlink] mode: Onboard, data rate: 4000 B/s on udp port 14280 remote port 14030
INFO [mavlink] mode: Gimbal, data rate: 400000 B/s on udp port 13030 remote port 13280
INFO [logger] logger started (mode=all)
INFO [logger] Start file log (type: full)
INFO [logger] [logger] ./log/2021-08-28/23_11_13.ulg
INFO [logger] Opened full log file: ./log/2021-08-28/23_11_13.ulg
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
pxh> [Wrn] [Event.cc:61] Warning: Deleting a connection right after creation. Make sure to save the ConnectionPtr from a Connect call
INFO [tone_alarm] home set
INFO [tone_alarm] notify negative
// 여기까지 가제보만 실행되었을 때 대기중
pxh> commander check
INFO [commander] Preflight check: OK
INFO [commander] Prearm check: OK
INFO [HealthFlags] DEVICE STATUS
INFO [HealthFlags] ----------------------------------
INFO [HealthFlags] GYRO:
INFO [HealthFlags] ACC:
INFO [HealthFlags] MAG: EN OK
INFO [HealthFlags] PRESS: EN OK
INFO [HealthFlags] AIRSP:
INFO [HealthFlags] GPS: OK
INFO [HealthFlags] OPT:
INFO [HealthFlags] VIO:
INFO [HealthFlags] LASER:
INFO [HealthFlags] GTRUTH:
INFO [HealthFlags] RATES:
INFO [HealthFlags] ATT:
INFO [HealthFlags] YAW:
INFO [HealthFlags] ALTCTL:
INFO [HealthFlags] POS:
INFO [HealthFlags] MOT:
INFO [HealthFlags] RC : EN OFF
INFO [HealthFlags] GYRO2:
INFO [HealthFlags] ACC2:
INFO [HealthFlags] MAG2: OK
INFO [HealthFlags] GEOFENCE:
INFO [HealthFlags] AHRS: EN OK
INFO [HealthFlags] TERRAIN:
INFO [HealthFlags] REVMOT:
INFO [HealthFlags] LOGGIN:
INFO [HealthFlags] BATT:
INFO [HealthFlags] PROX:
INFO [HealthFlags] SATCOM:
INFO [HealthFlags] PREARM: EN OK
INFO [HealthFlags] OBSAVD:
pxh>
INFO [mavlink] partner IP: 127.0.0.1 // MAVROS 가 연결되면 메시지가 나타남
INFO [commander] Armed by external command // movros에서 arm 명령 전달받음
INFO [commander] Takeoff detected // offboard control을 통해 미션 수행 시작
두번째 터미널에서 mavros 패키지를 실행한다.
fcu_url이 제대로 연결이 되었는지 확인한다. 실제 하드웨어가 아니라 SITL에서는 udp로 설정되어야 한다.
정상적으로 연결이되면 Gazebo에서 mission, waypoint, position등을 받았다는 메시지를 수신한다
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot$ roslaunch modudculab_ros ctrl_pos_gazebo.launch
... logging to /home/swift/.ros/log/cf39ff42-0855-11ec-b404-1d6a18c5f397/roslaunch-swift-System-Product-Name-11541.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://localhost:33873/
SUMMARY
========
PARAMETERS
* /mavros/conn_heartbeat: 5.0
* /mavros/conn_timeout: 5.0
* /mavros/fcu_url: udp://:14540@127....
* /mavros/gcs_url:
* /mavros/mocap/use_pose: False
* /mavros/mocap/use_tf: True
* /mavros/startup_px4_usb_quirk: True
* /mavros/target_component_id: 1
* /mavros/target_system_id: 1
* /rosdistro: noetic
* /rosversion: 1.15.11
NODES
/
mavros (mavros/mavros_node)
pub_setpoints (modudculab_ros/pub_setpoints_pos)
auto-starting new master
process[master]: started with pid [11549]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to cf39ff42-0855-11ec-b404-1d6a18c5f397
process[rosout-1]: started with pid [11559]
started core service [/rosout]
process[mavros-2]: started with pid [11566]
process[pub_setpoints-3]: started with pid [11567]
[ INFO] [1630192519.015756583]: FCU URL: udp://:14540@127.0.0.1:14557
[ INFO] [1630192519.017012942]: udp0: Bind address: 0.0.0.0:14540
[ INFO] [1630192519.017047209]: udp0: Remote address: 127.0.0.1:14557
[ INFO] [1630192519.017107928]: GCS bridge disabled
[ INFO] [1630192519.020174887]: udp0: Remote address: 127.0.0.1:14580
[ INFO] [1630192519.022630501]: Plugin 3dr_radio loaded
[ INFO] [1630192519.023145774]: Plugin 3dr_radio initialized
[ INFO] [1630192519.023181622]: Plugin actuator_control loaded
[ INFO] [1630192519.024896722]: Plugin actuator_control initialized
[ INFO] [1630192519.026759273]: Plugin adsb loaded
[ INFO] [1630192519.028422117]: Plugin adsb initialized
[ INFO] [1630192519.028480282]: Plugin altitude loaded
[ INFO] [1630192519.028991611]: Plugin altitude initialized
[ INFO] [1630192519.029041072]: Plugin cam_imu_sync loaded
[ INFO] [1630192519.029361407]: Plugin cam_imu_sync initialized
[ INFO] [1630192519.029411897]: Plugin command loaded
[ INFO] [1630192519.031869307]: Plugin command initialized
[ INFO] [1630192519.031912814]: Plugin companion_process_status loaded
[ INFO] [1630192519.033041869]: Plugin companion_process_status initialized
[ INFO] [1630192519.033091483]: Plugin debug_value loaded
[ INFO] [1630192519.035117446]: Plugin debug_value initialized
[ INFO] [1630192519.035167020]: Plugin distance_sensor loaded
[ WARN] [1630192519.035562965]: DS: plugin not configured!
[ INFO] [1630192519.035580599]: Plugin distance_sensor initialized
[ INFO] [1630192519.035617712]: Plugin esc_status loaded
[ INFO] [1630192519.036123133]: Plugin esc_status initialized
[ INFO] [1630192519.036189366]: Plugin fake_gps loaded
[ INFO] [1630192519.040557449]: Plugin fake_gps initialized
[ INFO] [1630192519.040614151]: Plugin ftp loaded
[ INFO] [1630192519.043642790]: Plugin ftp initialized
[ INFO] [1630192519.043731006]: Plugin geofence loaded
[ INFO] [1630192519.045969067]: Plugin geofence initialized
[ INFO] [1630192519.046027178]: Plugin global_position loaded
[ INFO] [1630192519.053096748]: Plugin global_position initialized
[ INFO] [1630192519.053151716]: Plugin gps_rtk loaded
[ INFO] [1630192519.054440988]: Plugin gps_rtk initialized
[ INFO] [1630192519.054481587]: Plugin gps_status loaded
[ INFO] [1630192519.055471040]: Plugin gps_status initialized
[ INFO] [1630192519.055516891]: Plugin hil loaded
[ INFO] [1630192519.061027805]: Plugin hil initialized
[ INFO] [1630192519.061110143]: Plugin home_position loaded
[ INFO] [1630192519.062972536]: Plugin home_position initialized
[ INFO] [1630192519.063029320]: Plugin imu loaded
[ INFO] [1630192519.065598315]: Plugin imu initialized
[ INFO] [1630192519.065661618]: Plugin landing_target loaded
[ INFO] [1630192519.070101201]: Plugin landing_target initialized
[ INFO] [1630192519.070172857]: Plugin local_position loaded
[ INFO] [1630192519.072673780]: Plugin local_position initialized
[ INFO] [1630192519.072728764]: Plugin log_transfer loaded
[ INFO] [1630192519.074028180]: Plugin log_transfer initialized
[ INFO] [1630192519.074098849]: Plugin manual_control loaded
[ INFO] [1630192519.075573360]: Plugin manual_control initialized
[ INFO] [1630192519.075627742]: Plugin mocap_pose_estimate loaded
[ INFO] [1630192519.077472088]: Plugin mocap_pose_estimate initialized
[ INFO] [1630192519.077531357]: Plugin mount_control loaded
[ INFO] [1630192519.079051424]: Plugin mount_control initialized
[ INFO] [1630192519.079103856]: Plugin obstacle_distance loaded
[ INFO] [1630192519.080421424]: Plugin obstacle_distance initialized
[ INFO] [1630192519.080467381]: Plugin odom loaded
[ INFO] [1630192519.082116867]: Plugin odom initialized
[ INFO] [1630192519.082169925]: Plugin onboard_computer_status loaded
[ INFO] [1630192519.083206690]: Plugin onboard_computer_status initialized
[ INFO] [1630192519.083268258]: Plugin param loaded
[ INFO] [1630192519.084514663]: Plugin param initialized
[ INFO] [1630192519.084562861]: Plugin play_tune loaded
[ INFO] [1630192519.085572651]: Plugin play_tune initialized
[ INFO] [1630192519.085621749]: Plugin px4flow loaded
[ INFO] [1630192519.088378483]: Plugin px4flow initialized
[ INFO] [1630192519.088436068]: Plugin rallypoint loaded
[ INFO] [1630192519.089769044]: Plugin rallypoint initialized
[ INFO] [1630192519.089819020]: Plugin rangefinder loaded
[ INFO] [1630192519.090089563]: Plugin rangefinder initialized
[ INFO] [1630192519.090142453]: Plugin rc_io loaded
[ INFO] [1630192519.091783095]: Plugin rc_io initialized
[ INFO] [1630192519.091837459]: Plugin safety_area loaded
[ INFO] [1630192519.093513227]: Plugin safety_area initialized
[ INFO] [1630192519.093573632]: Plugin setpoint_accel loaded
[ INFO] [1630192519.094816301]: Plugin setpoint_accel initialized
[ INFO] [1630192519.094879203]: Plugin setpoint_attitude loaded
[ INFO] [1630192519.098107677]: Plugin setpoint_attitude initialized
[ INFO] [1630192519.098169170]: Plugin setpoint_position loaded
[ INFO] [1630192519.104660044]: Plugin setpoint_position initialized
[ INFO] [1630192519.104730523]: Plugin setpoint_raw loaded
[ INFO] [1630192519.108783194]: Plugin setpoint_raw initialized
[ INFO] [1630192519.108846628]: Plugin setpoint_trajectory loaded
[ INFO] [1630192519.110966452]: Plugin setpoint_trajectory initialized
[ INFO] [1630192519.111026916]: Plugin setpoint_velocity loaded
[ INFO] [1630192519.113586102]: Plugin setpoint_velocity initialized
[ INFO] [1630192519.113654277]: Plugin sys_status loaded
[ INFO] [1630192519.118003771]: Plugin sys_status initialized
[ INFO] [1630192519.118063973]: Plugin sys_time loaded
[ INFO] [1630192519.120282688]: TM: Timesync mode: MAVLINK
[ INFO] [1630192519.120806697]: Plugin sys_time initialized
[ INFO] [1630192519.120861900]: Plugin trajectory loaded
[ INFO] [1630192519.123210753]: Plugin trajectory initialized
[ INFO] [1630192519.123276056]: Plugin vfr_hud loaded
[ INFO] [1630192519.123549099]: Plugin vfr_hud initialized
[ INFO] [1630192519.123603248]: Plugin vibration loaded
[ INFO] [1630192519.124044651]: Plugin vibration initialized
[ INFO] [1630192519.124102668]: Plugin vision_pose_estimate loaded
[ INFO] [1630192519.126834399]: Plugin vision_pose_estimate initialized
[ INFO] [1630192519.126889091]: Plugin vision_speed_estimate loaded
[ INFO] [1630192519.128364557]: Plugin vision_speed_estimate initialized
[ INFO] [1630192519.128420669]: Plugin waypoint loaded
[ INFO] [1630192519.130291024]: Plugin waypoint initialized
[ INFO] [1630192519.130339375]: Plugin wheel_odometry loaded
[ WARN] [1630192519.132184031]: WO: Not all wheels have parameters specified (0/2).
[ WARN] [1630192519.132206269]: WO: No odometry computations will be performed.
[ INFO] [1630192519.132220816]: Plugin wheel_odometry initialized
[ INFO] [1630192519.132276015]: Plugin wind_estimation loaded
[ INFO] [1630192519.132559340]: Plugin wind_estimation initialized
[ INFO] [1630192519.132583231]: Autostarting mavlink via USB on PX4
[ INFO] [1630192519.132604938]: Built-in SIMD instructions: SSE, SSE2
[ INFO] [1630192519.132621172]: Built-in MAVLink package version: 2021.8.8
[ INFO] [1630192519.132637497]: Known MAVLink dialects: common ardupilotmega ASLUAV all development icarous matrixpilot paparazzi standard uAvionix ualberta
[ INFO] [1630192519.132648378]: MAVROS started. MY ID 1.240, TARGET ID 1.1
[ INFO] [1630192519.144251347]: IMU: High resolution IMU detected!
[ INFO] [1630192519.144316495]: IMU: Attitude quaternion IMU detected!
[ INFO] [1630192519.245268125]: CON: Got HEARTBEAT, connected. FCU: PX4 Autopilot
[ INFO] [1630192519.250769695]: IMU: High resolution IMU detected!
[ INFO] [1630192519.251073442]: IMU: Attitude quaternion IMU detected!
[ INFO] [1630192520.259944089]: GF: Using MISSION_ITEM_INT
[ INFO] [1630192520.260150616]: RP: Using MISSION_ITEM_INT
[ INFO] [1630192520.260274111]: WP: Using MISSION_ITEM_INT
[ INFO] [1630192520.260389267]: VER: 1.1: Capabilities 0x000000000000e4ef
[ INFO] [1630192520.260555567]: VER: 1.1: Flight software: 010d0040 (ab1c90d831000000)
[ INFO] [1630192520.260687643]: VER: 1.1: Middleware software: 010d0040 (ab1c90d831000000)
[ INFO] [1630192520.260795360]: VER: 1.1: OS software: 050b00ff (8660572a3c69e0e2)
[ INFO] [1630192520.260930184]: VER: 1.1: Board hardware: 00000001
[ INFO] [1630192520.261065881]: VER: 1.1: VID/PID: 0000:0000
[ INFO] [1630192520.261187025]: VER: 1.1: UID: 4954414c44494e4f
[ WARN] [1630192520.263791128]: CMD: Unexpected command 520, result 0
[ INFO] [1630192534.245740703]: GF: mission received
[ INFO] [1630192534.246900262]: RP: mission received
[ INFO] [1630192534.248741690]: WP: mission received
세번째 터미널에서 mavros를 이용하여 Armming 및 Offboard 명령을 보낸다.
mavros로 arm명령을 넘겨주면 Gazebo에서 드론이 armming 해서 프롭이 회전하게 된다. 이때 바로 연속해서 Offboard 명령을 보내면 된다. 만약 armming 후 일정시간이 지나면 자동으로 disarm으로 전환된다. 이 경우는 다시 arm 명령을 보내주어야 한다.
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot/Tools$ rosrun mavros mavsafety arm
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot/Tools$ rosrun mavros mavsys mode -c OFFBOARD
Mode changed.
실행중 다시한번 상태를 확인해보면 아래와 같이 정상 동작중임을 알 수 있다.
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot/Tools$ rostopic echo -n1 /diagnostics | tee /tmp/diag.yml
header:
seq: 170
stamp:
secs: 1630192742
nsecs: 632945015
frame_id: ''
status:
-
level: 0
name: "mavros: FCU connection"
message: "connected"
hardware_id: "udp://:14540@127.0.0.1:14557"
values:
-
key: "Received packets:"
value: "24604"
-
key: "Dropped packets:"
value: "0"
-
key: "Buffer overruns:"
value: "0"
-
key: "Parse errors:"
value: "0"
-
key: "Rx sequence number:"
value: "205"
-
key: "Tx sequence number:"
value: "0"
-
key: "Rx total bytes:"
value: "5402047"
-
key: "Tx total bytes:"
value: "1508381"
-
key: "Rx speed:"
value: "36253.000000"
-
key: "Tx speed:"
value: "10125.000000"
-
level: 0
name: "mavros: GPS"
message: "3D fix"
hardware_id: "udp://:14540@127.0.0.1:14557"
values:
-
key: "Satellites visible"
value: "10"
-
key: "Fix type"
value: "3"
-
key: "EPH (m)"
value: "0.00"
-
key: "EPV (m)"
value: "0.00"
-
level: 0
name: "mavros: Heartbeat"
message: "Normal"
hardware_id: "udp://:14540@127.0.0.1:14557"
values:
-
key: "Heartbeats since startup"
value: "224"
-
key: "Frequency (Hz)"
value: "1.037032"
-
key: "Vehicle type"
value: "Quadrotor"
-
key: "Autopilot type"
value: "PX4 Autopilot"
-
key: "Mode"
value: "OFFBOARD"
-
key: "System status"
value: "Active"
-
level: 2
name: "mavros: System"
message: "Sensor health"
hardware_id: "udp://:14540@127.0.0.1:14557"
values:
-
key: "Sensor present"
value: "0x1028002C"
-
key: "Sensor enabled"
value: "0x1021000C"
-
key: "Sensor health"
value: "0x102E002F"
-
key: "3D magnetometer"
value: "Ok"
-
key: "absolute pressure"
value: "Ok"
-
key: "rc receiver"
value: "Fail"
-
key: "AHRS subsystem health"
value: "Ok"
-
key: "pre-arm check status. Always healthy when armed"
value: "Ok"
-
key: "CPU Load (%)"
value: "22.4"
-
key: "Drop rate (%)"
value: "0.0"
-
key: "Errors comm"
value: "0"
-
key: "Errors count #1"
value: "0"
-
key: "Errors count #2"
value: "0"
-
key: "Errors count #3"
value: "0"
-
key: "Errors count #4"
value: "0"
-
level: 0
name: "mavros: Battery"
message: "Normal"
hardware_id: "udp://:14540@127.0.0.1:14557"
values:
-
key: "Voltage"
value: "15.10"
-
key: "Current"
value: "-1.0"
-
key: "Remaining"
value: "51.0"
---
swift@swift-System-Product-Name:~/workspace/catkin_ws/src/PX4-Autopilot/Tools$
Offbard를 이용하여 mavlink 명령으로 position hold를 수행하는 예
Offbard를 이용하여 mavlink 명령으로 trajectory를 수행하는 예
'엔지니어링 > 드론' 카테고리의 다른 글
| [ PX4 ] 조이스틱으로 PX4 시뮬레이션 조종하기 (0) | 2021.08.31 |
|---|---|
| PX4와 Mavlink로를 연동하여 군집드론 시뮬레이션하는 방법 (0) | 2021.08.23 |
| SWaP-C? (0) | 2021.08.11 |
| [ VOXL ] VOXL-DFS-SERVER 컴파일 완료 (0) | 2021.07.17 |
| [ VOXL ] 펌웨어 업데이트(ver 0.4.6) 및 세팅 (0) | 2021.07.01 |


댓글