기체 #1 실내 점검
1) 텔레메트리 연결
57600bps로 텔레메트리 연결
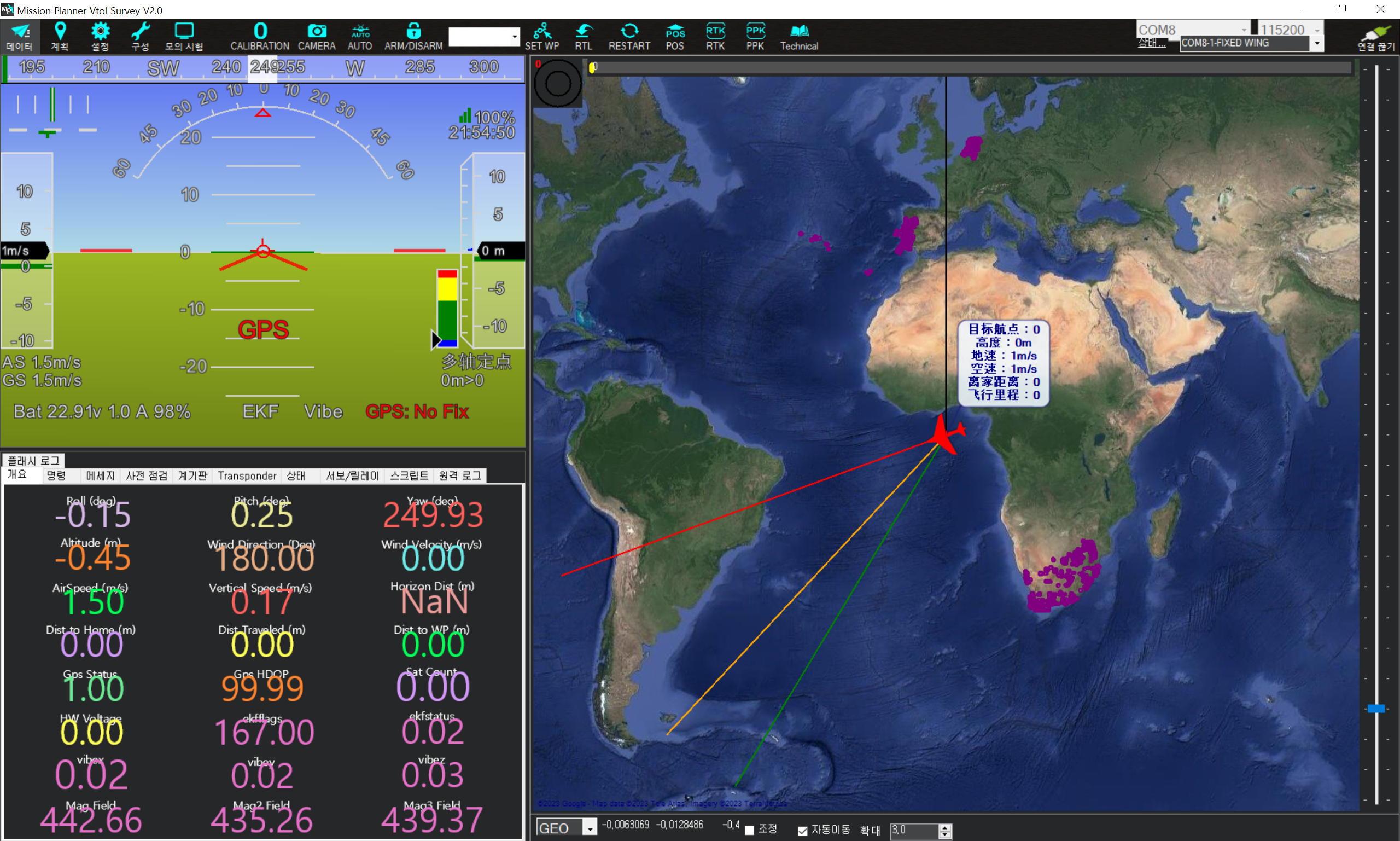
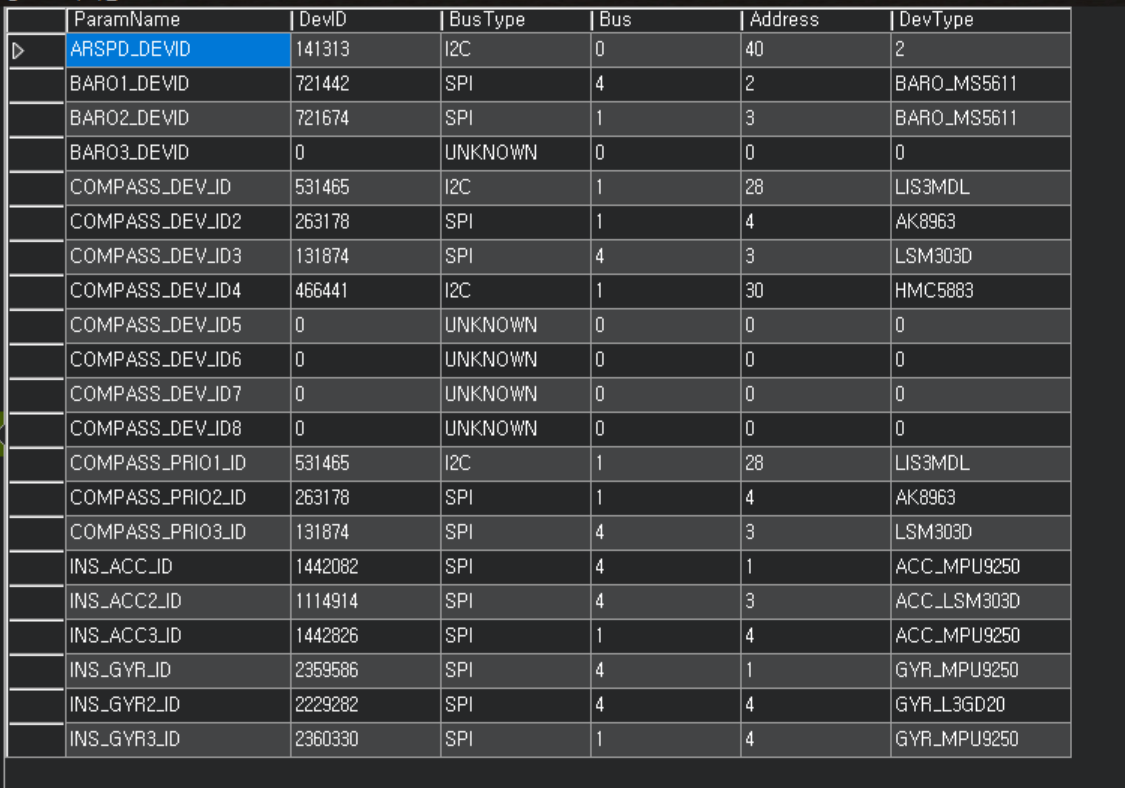
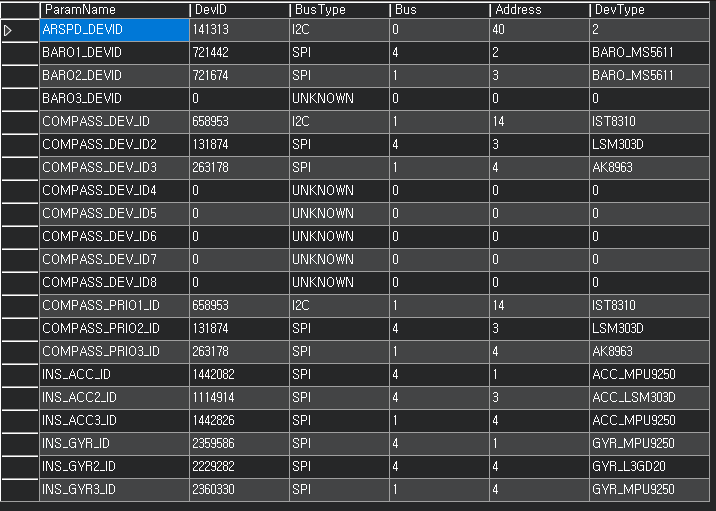
미션플래너에서 확인한 장치리스트
기본 파라미터 설정

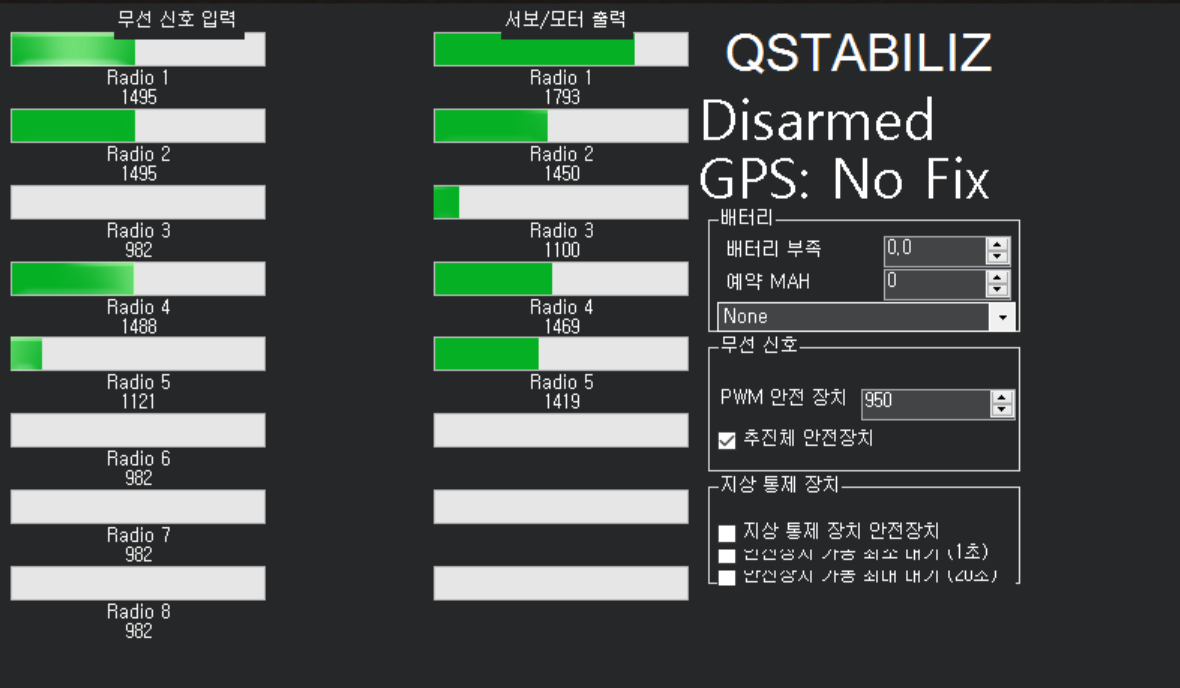
세부설정

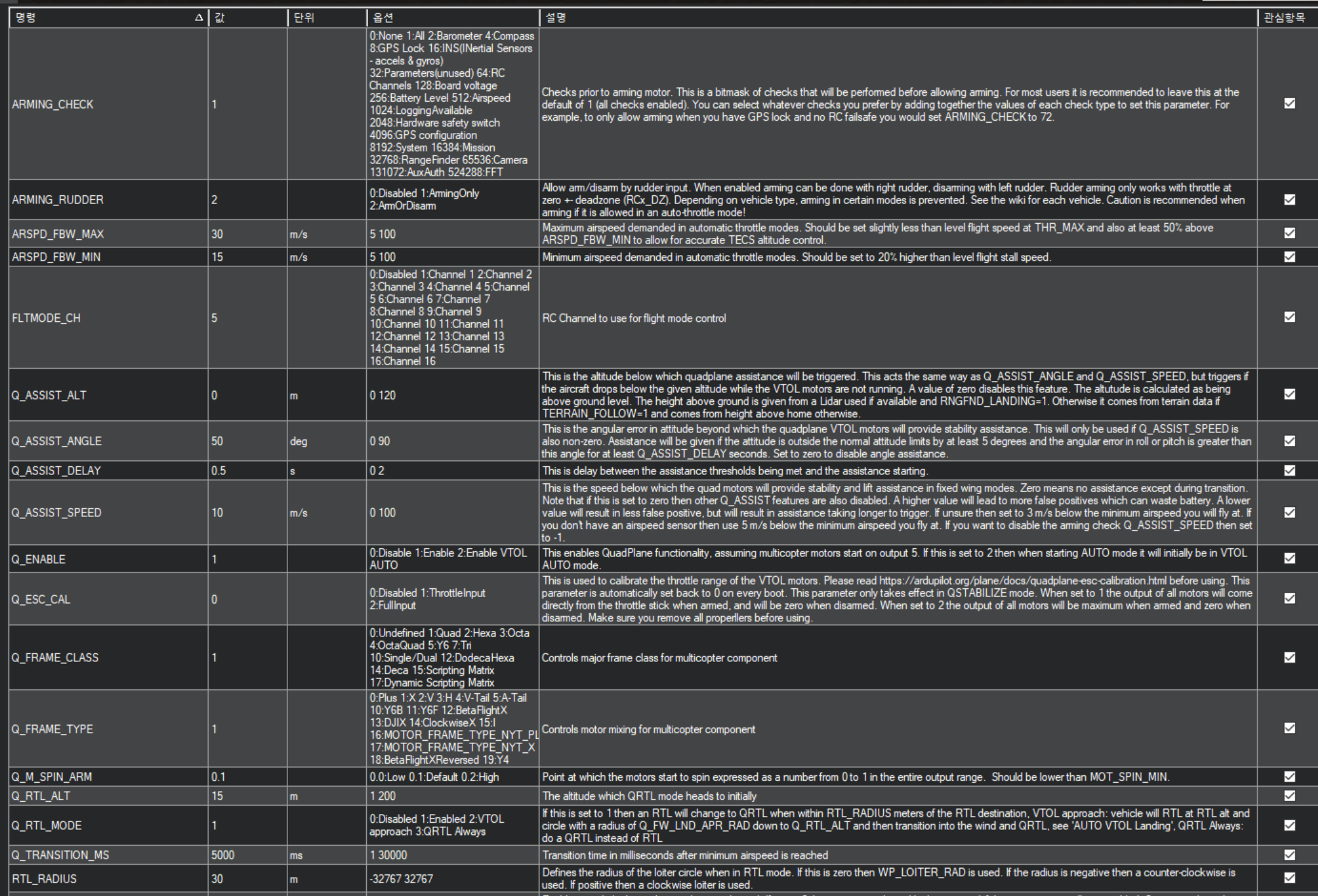
주요 파라미터 수정 내용
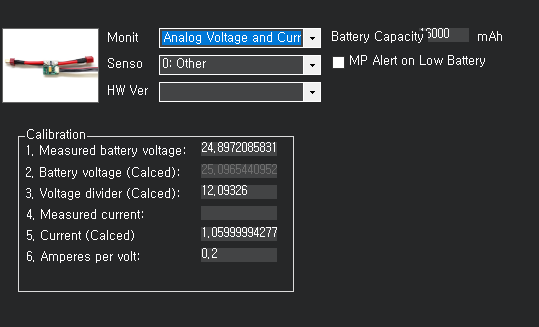
2) 배터리 전압확인
- 측정시 22.8v 측정됨, 하지만, 전류값은 바르지 않음(FC에만 공급되는 전류임)
3) 배터리 발란스 측정
- 배터리 좌우에 스펀지를 덧대에서 이격이 없도록 설치
- 발란스 맞추기 위해서 배터리 트레이 뒤쪽까지 밀어주고 종이테이프로 표시된 곳에 배터리 아래모서리를 맞추면 발란스가 맞음
4) 모터 발란스 측정
- 4축 모터의 수평은 맞추었음
- 모터 앞뒤 축간의 높이가 조금 맞지 않음, 3번모터가 2번보다 5mm이상 높음, 보정을 했으나 아직 차이가 남
5) 레벨
- 바닥면에서 수평 잘 맞는 편임
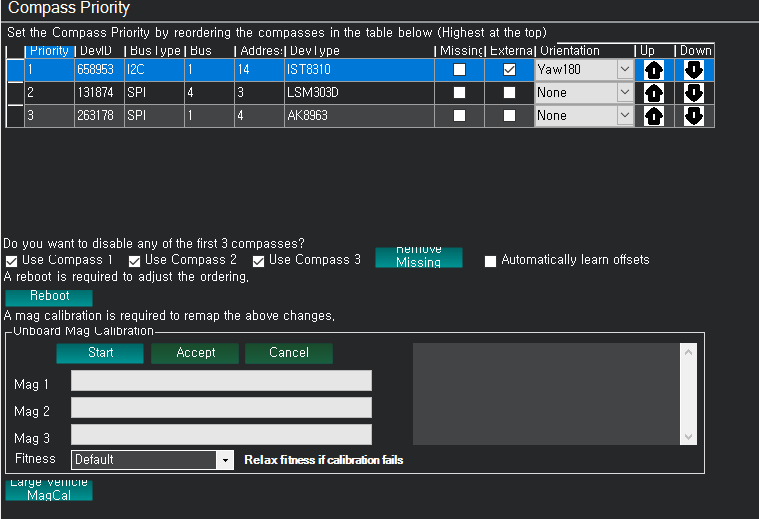
6) 지자계
- 외부는 LIS3MDL 센서를 사용함, 외부센서는 180도 회전되어 설치되어 있으므로 Orientation Yaw180 적용해주어야 함

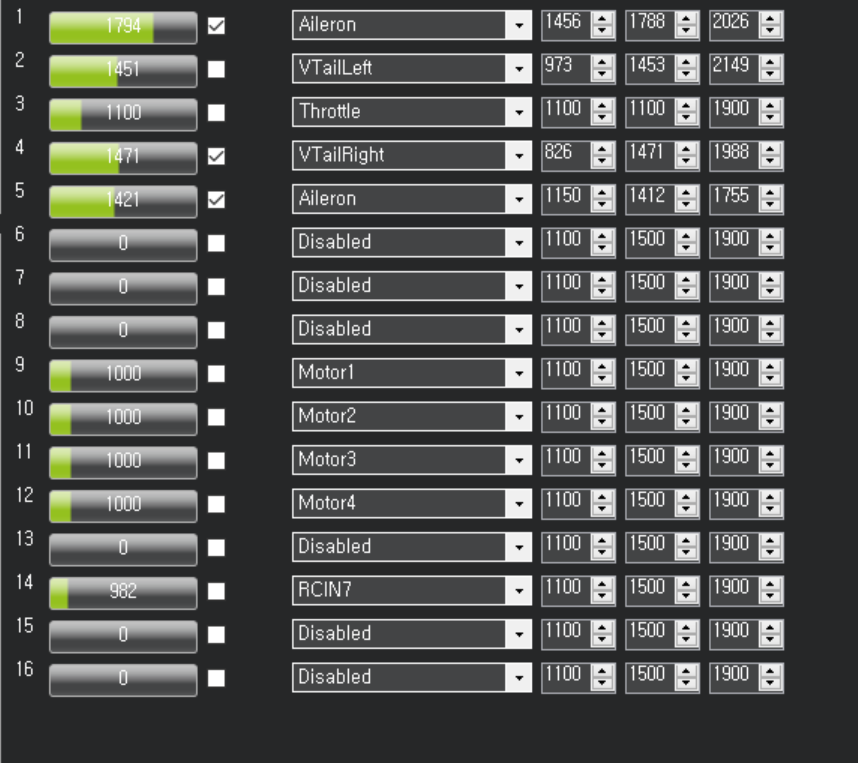
7) 서보 오프셋 설정
- 매뉴얼모드에서 타각의 중심을 맞추었음
- 타각의 범위는타각 측정기를 통해 맞추었음

8) ESC Calibration
- Q_ESC_CAL=1, Q_SPIN_MIN=0, PREARM_CHECK = 0, Rudder로 Armming할 수 있도록 수정으로 수정
- FC와 수신기는 배터리를 연결하지 않고, USB 케이블을 이용하여 전원공급
- FC와 미션플래너 연결은 USB를 이용하여 연결
- Safety button 눌러 해제
- 모드는 QStable모드
- 조종기로 Armming
- Armming되었으면 Rudder는 중립한 상태에서 스로틀을 최대로 하고 메인 배터리 전원인가
- 모터에서 최대값 인식 음 나면 스로틀 최소(쿼드 모터 4개의 Calibration 완료)
- 다시 모드를 Manual로 수정
- 이후값을 반복하여 푸셔모터의 ESC Calibration 수행
9) 모터 방향 확인
- 쿼드 모터의 방향은 아래와 같음
- A: 반시계 방향
- B: 시계방향
- C: 반시계방향
- D: 시계방향
- 푸셔모터는 기체를 정면에서 바라볼 때 반시계방향 회전

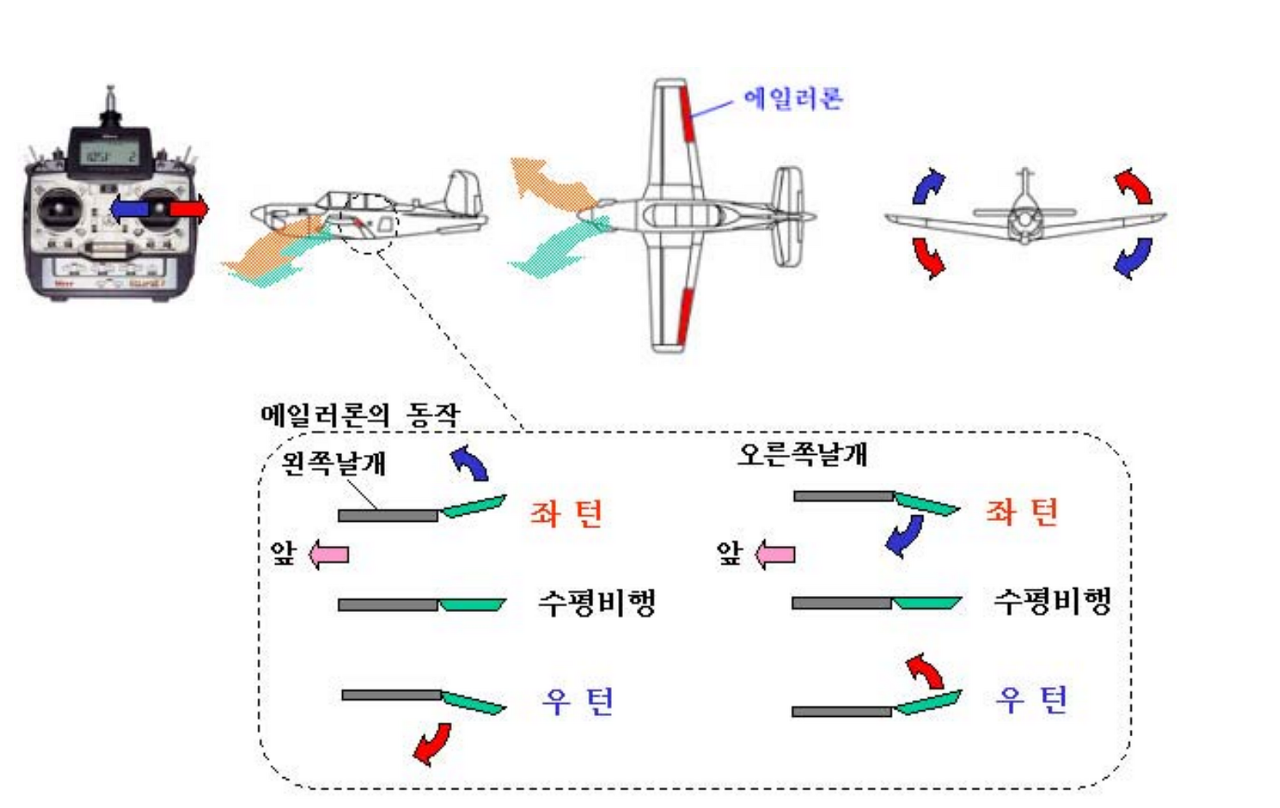
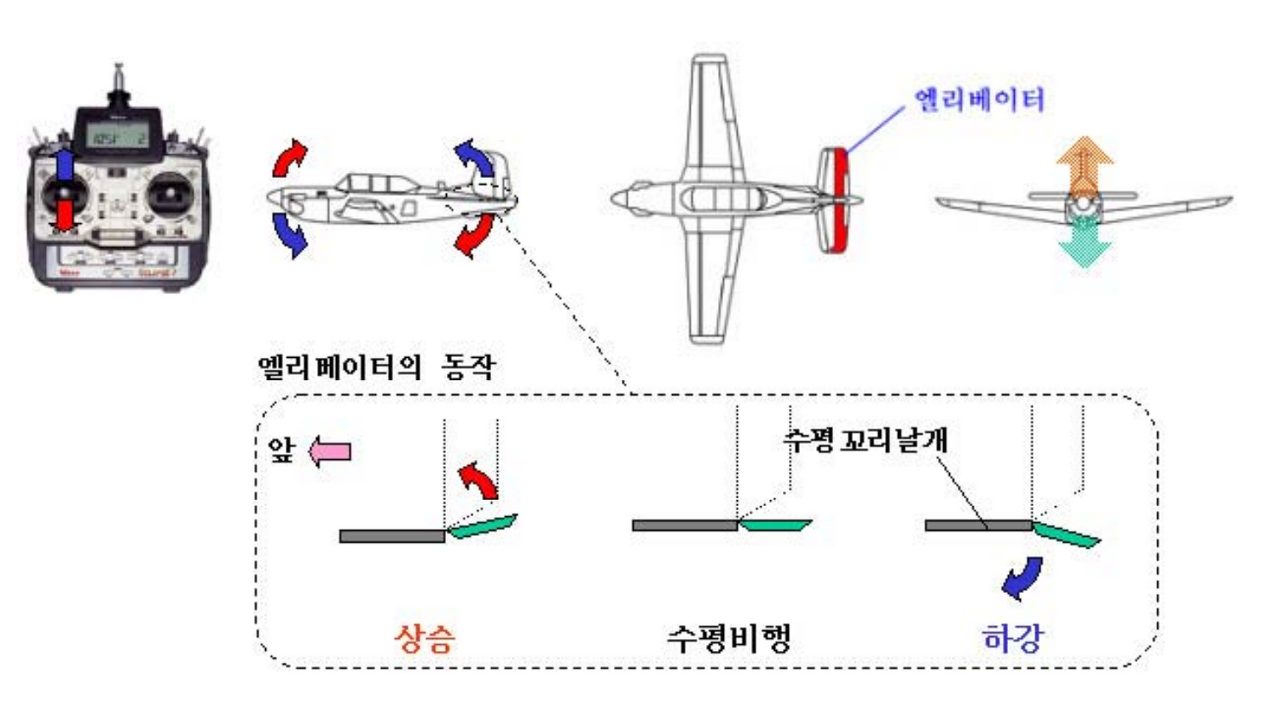
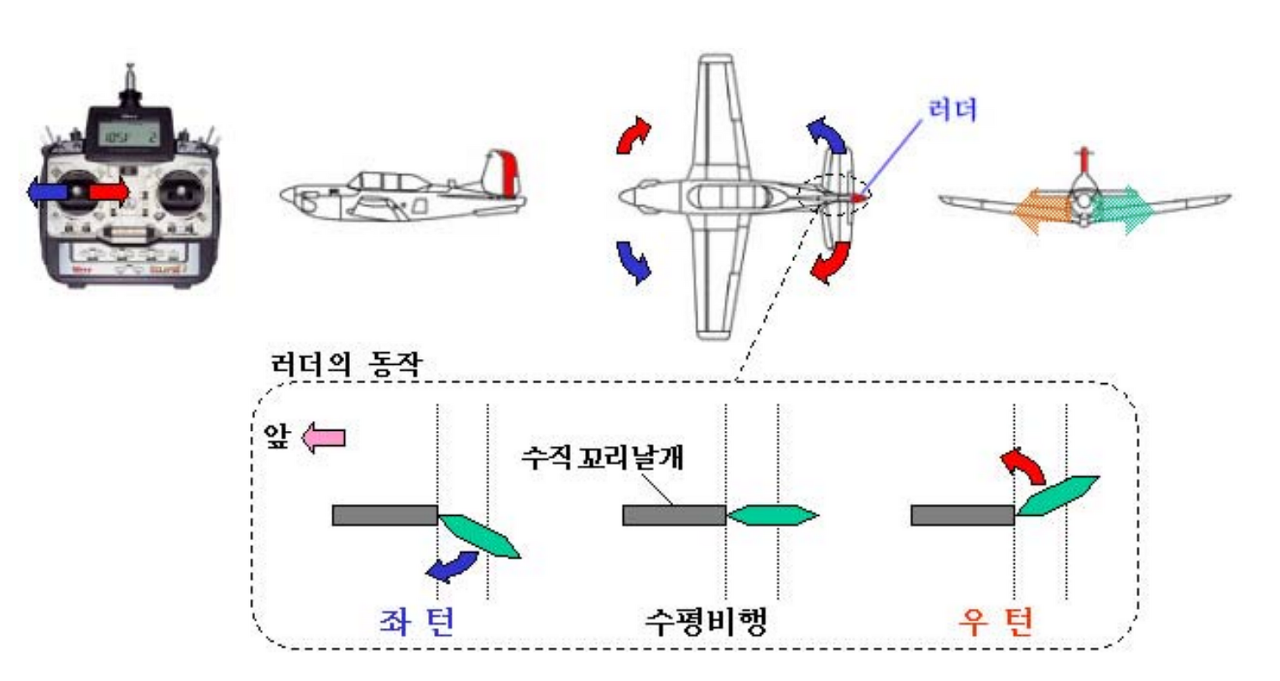
10) 서보방향 확인
- 비행모드를 매뉴얼 모드에서 확인
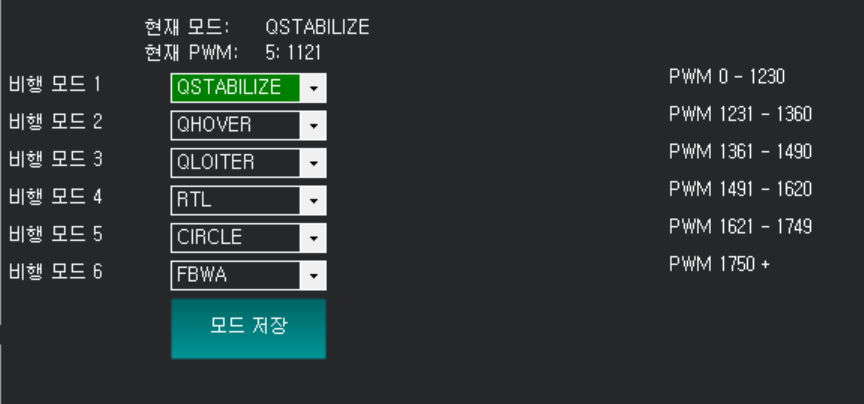
11) 비행기 모드 설정
- 6개의 비행 모드를 설정하기 위해 2단카 믹싱을 적용해야 한다.
12) 페일 세이프 설정
조종기를 끄면 Failsafe로 QLAND로 넘어가도록 되어 있음

시험일자: 2023년 10월 08일 09:30~12:30
시험장소: 남사시민야구장 인근 공원

비행전 기념사진


비행 뒷모습을 보면 왼쪽 아래로 기울어져 보임, 실제로 기울어져 있음을 확인했고, 모터 축간 레벨이 맞지 않았음, 그리고 GPS Lock모드에서 고정되어있지 않고 주변을 맴돌면서 흐르는 현상, 헤딩이 마음대로 돌아가는 현상이 자주 목격되었음
문제점
- Compass 센서의 정확도 떨어짐, 외부 지자계 센서 사용이 되지 않음 -> 센서 세팅 오류
- 발란스 맞지 않음, 기체 Arm 수평이 맞지않고 앞뒤 축간의 높이도 맞지 않아 기체가 기울어짐 -> 와셔를 넣어서 발란스를 다시 맞춤
- 기체 떨림현상 -> PID 게인을 조절하려고 했으나 일정고도이상시 정상으로 비행이 됨
큐브에서 사용하는 GPS는 Here인데 HMM5883이 아니라 LIS3MDL이었음, Automatically learn offsets를 선택하였더니 정상적인 Compass센서가 나왔음, 그래서 파라메터 전체에서 수동으로 외부로 지정하고, Orientation도 Yaw180으로 수정하였음

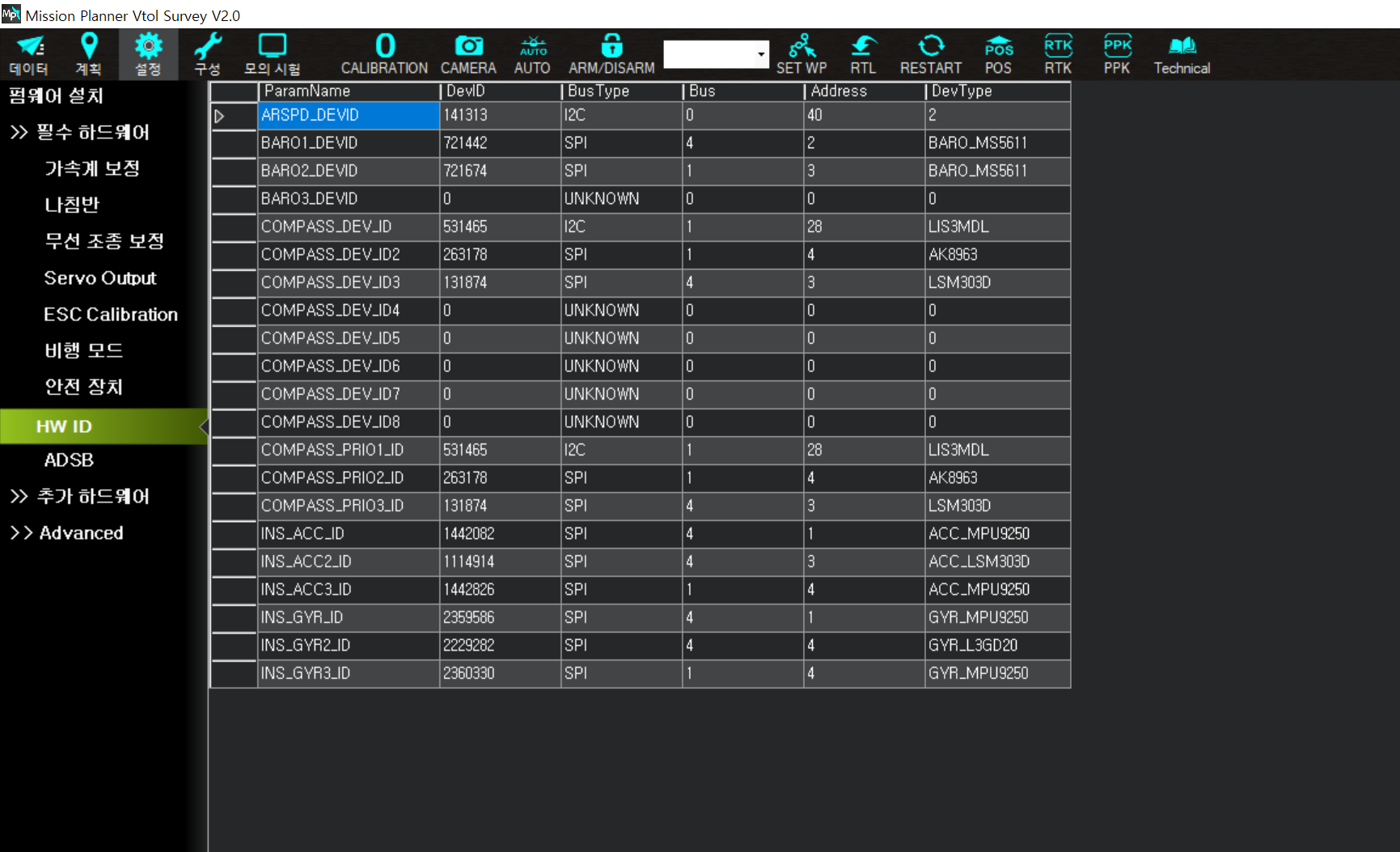
HW ID를 보면 I2C는 속도센서와 COMPASS_1번, LIS3MDL Compass 센서임

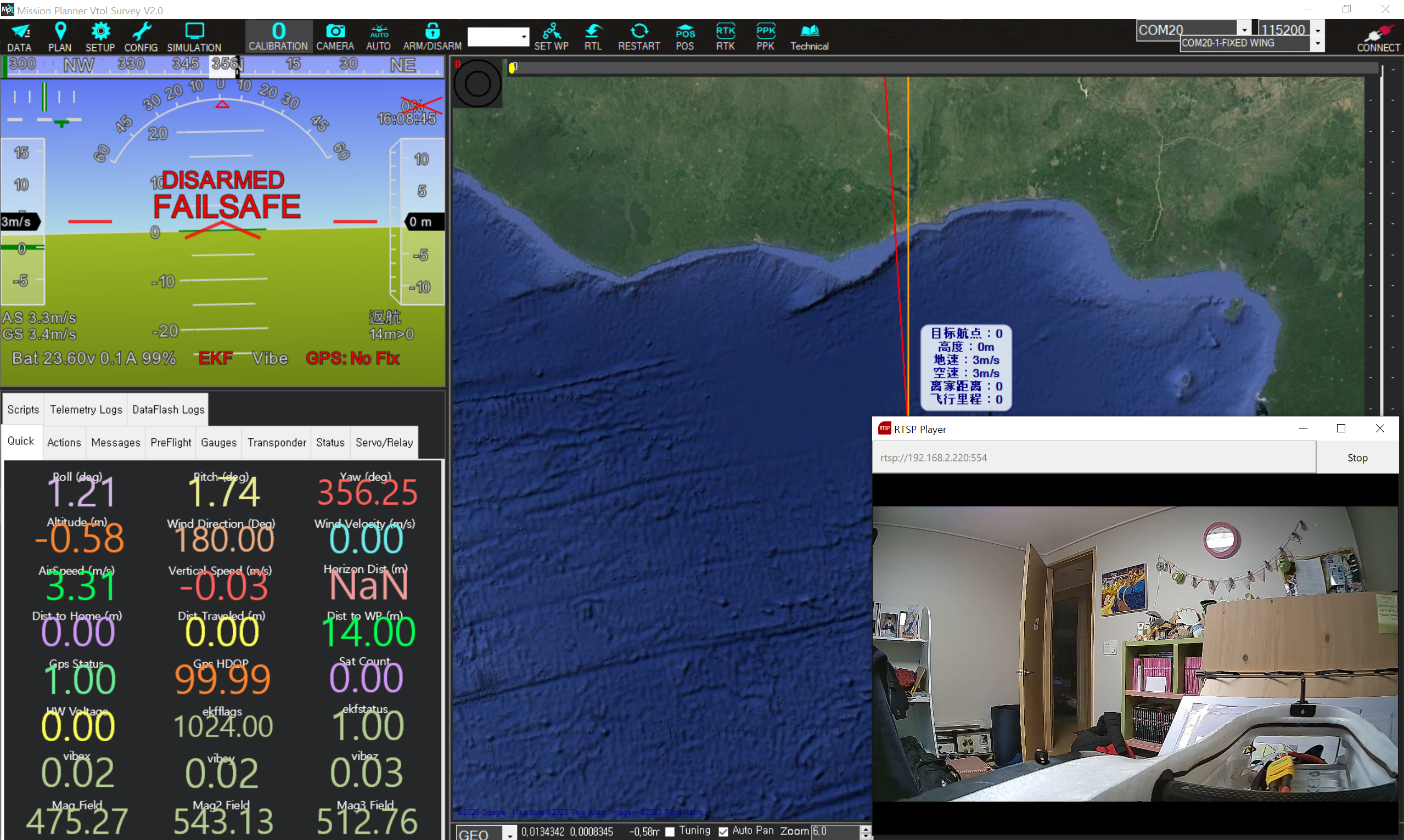
미션플래너의 HUD 항목들도 위와 같이 변경하였음, SatCount값도 바로 확인 가능함
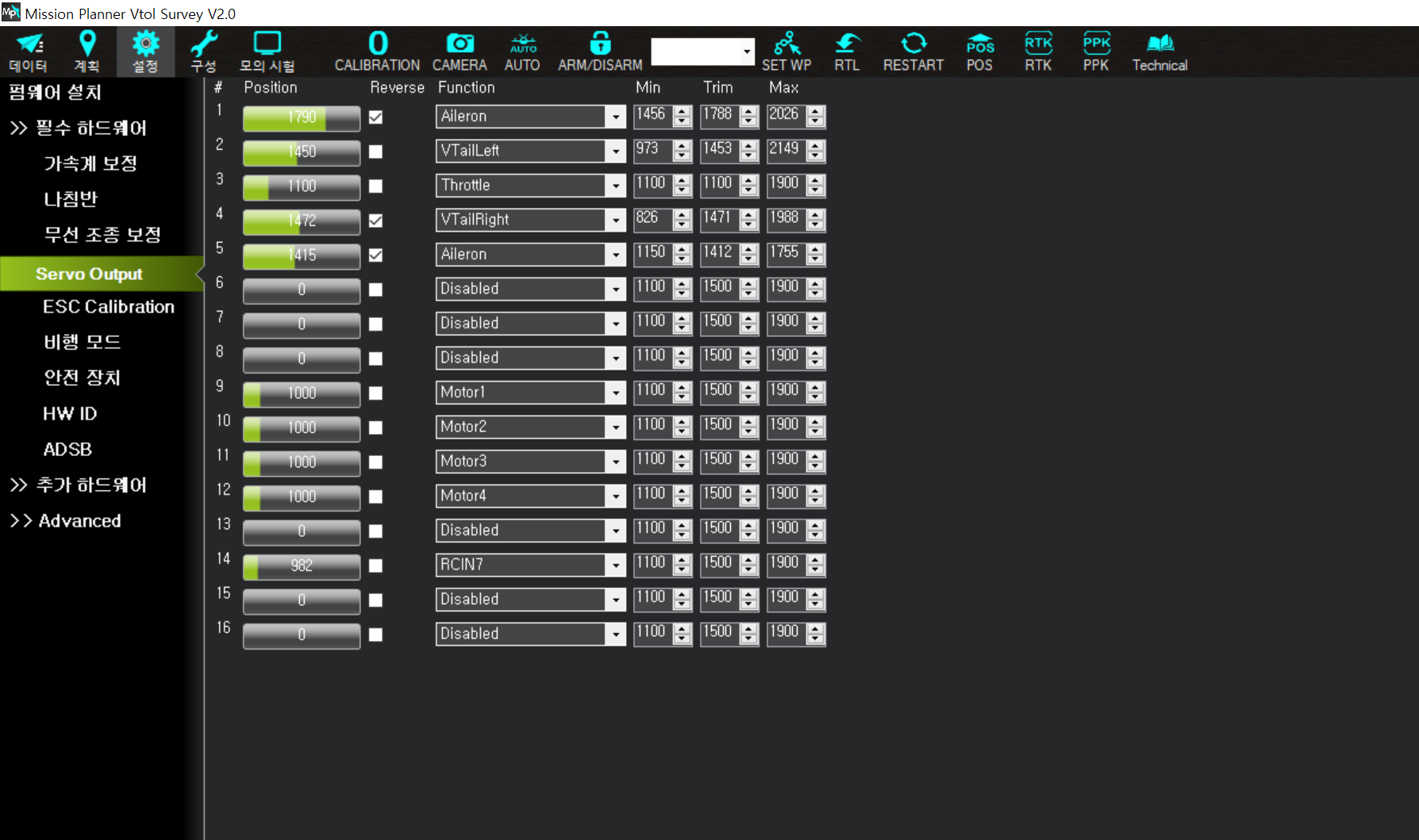
서보 설정 현황
23년 10월 13일 야외시험 수행
- 모터 축이 맞지 않아 호버링하자마자 기체가 반시계방향으로 돌아감
- QLoiter에서 Pitch 방향이 반대로 되어 있었음(조종기에서 Elevation 타를 반대로 수정하고 서보 출력을 맞추어줌
비행기 모드
- QStable, QHover, QLoiter에서는 타각이 움직이기는 하지만 조금씩 조심스럽게 움직임 확인
23년 10월 15일
궁평항 야외시험
바람이 많이 분다. 비행기도 많이 다닌다.
Hero를 호버링하려고 올렸더니 사시나무떨듯 떨린다.
조종기 버튼 고장났다.
데이터링크 고장났다. 예비 데이터링크도 없다.
뭐가 문제인지 모르겠다....
2025년 3월 15일
Hero기체의 GPS를 M10N으로 수정하고 설정값을 다시 확인하였다.
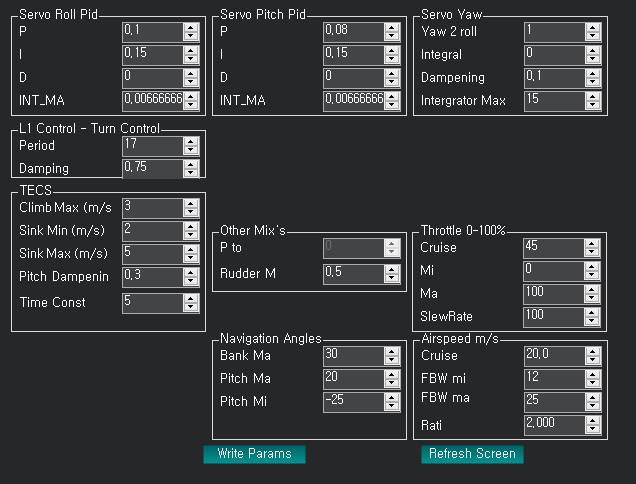
사시나물 떨리듯한 동작은 PID 게인중 Roll 게인값을 아래와 같이 조절해주면 개선된다.

GPS는 외부가 1순위가 되도록 설정 변경, GPS는 M10N으로 변경하여 설치되었음



2023년 12월 16일 데이터링크 rtsp 카메라 연결
'엔지니어링 > 드론' 카테고리의 다른 글
| [STM32] VSCode에서 CrazyFlie 펌웨어 디버깅하기 (2) | 2023.12.31 |
|---|---|
| VTOL 야외 비행시험 절차 및 수행 (1) | 2023.10.24 |
| [STM32 자작드론] FrSky SBUS 수신기 구현 (0) | 2023.02.18 |
| [STM32 자작드론] GPS 데이터 수신기 UART DMA 구현하기 (0) | 2023.02.05 |
| [ VOXL ] Camera Calibration (0) | 2022.11.02 |




댓글