※ 중요사항
- 비행전 사전 체크사항을 반드시 확인할 것
- 프롭 연결과 Safety Switch, 조종기를 끄고 켜는 순서는 반드시 시험절차에 따라 수행할 것
- 비행시험은 반드시 최소 2명이 함께 수행할 것(1명은 기체 제어, 1명은 미션플래너로 상태 확인)
- 시험후 모든 장비는 사전과 같은 상태로 정리할 것
사전 준비사항
| 항목 | 내용 | 비고 | |
| 1 | 기체 | MFE Fighter 2430mm | |
| 2 | 조종기 | 후타바 14SG | |
| 3 | 텔레메트리 | P900 통신 모듈 | |
| 4 | 배터리 | Tattu 6S 22000mah 25C * 2개 | |
| 5 | 노트북 | Mission Plan(VTOL)이 설치된 노트북 | Windows 10 이상 |
| 6 | 기타 공구 | 테프론와이어, 전압측정기, M3 Hex 렌치, 스패너 등 |
시험비행확인서
| 시험일자 | 제품번호 | ||
| 시험장소 | 시험수행자 | ||
| 날씨 | 풍속 |
| 항목 | 내용 | 준비물 | 규격 | 확인 | |
| 1 | COG확인 | 기체의 무게중심 및 배터리 발란스 확인 | 테프론와이어 | ||
| 2 | 배터리 전압 | 배터리 전압 측정 | 전압측정기 | ||
| 3 | 조종기 연결 | 조종기와 수신기 연결 확인 | |||
| 4 | 텔레메트리 연결 | 미션플래너에서 텔레메트리 연결 확인 | |||
| 5 | 비행모드 | 조종기 키를 변경하여 비행모드 변경 확인 | ≤3m/s | ||
| 6 | 속도센서 | 속도센서 상태 확인 | |||
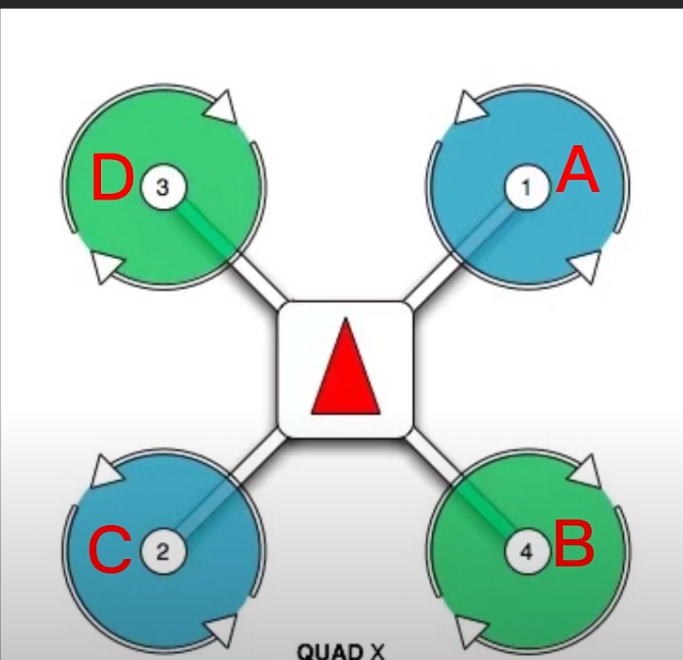
| 7 | 모터 방향 | 쿼드 모터의 회전 방향 확인(1,2번 반시계, 3,4번 시계 방향 회전) | |||
| 쿼드Stabilization | QStable모드에서 쿼드모터 Stabilization 확인 | ||||
| 8 | 서보 방향 | Manual모드에서 서보 방향 확인 | |||
| 9 | 서보 Stabilization | FBWA모드에서 서보 Stabilization 확인 | |||
| Puser 모터방향 | Pusher 모터의 회전방향 확인(반시계방향) | ||||
| 10 | 프롭 확인 | 1,2번 프롭은 CCW, 3,4번 프롭은 CW | M3 렌치 스패너 |
||
| 11 | 전압 확인 | 미션플래너에서 전압 확인 | |||
| 텔레메트리 강도 확인 | 미션플래너에서 텔레메트리 강도 확인 | ||||
| Compass 방향 확인 | 미션플래너에서 Compass 방향과 기체 기수방향 확인 | ||||
| 속도센서값 확인 | 미션플래너에서 속도 센서값 확인 | ≤3m/s | |||
| GPS HDOP | 미션플래너에서 GPS HDOP 값 확인 | ≤1 | |||
| GPS Status | 미션플래너에서 GPS Status 값 확인 | ≥4 | |||
| SAT Count | 미션플래너에서 SAT Count 값 확인 | ≥10 | |||
| 12 | QStable 비행 | 기체 방향전환 및 제어 확인 | |||
| 13 | QHover 비행 | 약 30초간 기체 고도 유지 확인 | |||
| 14 | QLoiter 비행 | 약 30초간 기체 고도 및 포지션 유지 확인 | |||
| 15 | Auto1 비행 | VTakeOff, RTL 미션 정상 수행 확인 | |||
| 16 | Auto2 비행 | VTakeOff, Waypoint, RTL 미션 정상 수행 확인 |
기체 형상





비행시험절차
1. 기체조립 및 배터리 장착
- 배터리 장착시 앞뒤 위치는 표시된 테이프에 맞추어 장착, 장착후 앞/뒤/ 좌/우/위의 공간을 폼으로 막아줌
- 테프론와이어를 사용하여 앞뒤 COG 발란스 확인
- 기체의 머리를 들어서 좌우 COG 발란스확인
2. 기체 전원 연결
- 프롭은 연결하지 않은 상태에서 수행
- 배터리 전압상태 체크(리포전압측정기 사용)


3. 조종기 연결
- 모든 스틱은 중립, 모든 키는 Low 상태에서 조종기 전원 ON
- Transmitter ? Yes를 선택하고 연결 상태 확인

4. 텔레메트리 연결
- Mission Planner VTOL Survay 실행
- 오른쪽 상단에 COMxx를 지정, Baudrate는 57600으로 선택하고 텔레메트리 연결
- 정상적으로 연결되면 Mavlink로 Parameter를 수신하고, Quick에서 값들이 주기적으로 업데이트되는 것이 확인됨

5. 비행모드 확인
- 조종기 키를 바꾸면서 아래 비행모드 전환이 정상적인지 확인
- QStable (SF ↓, SE ↓)
- QHover (SF ↓, SE ·)
- QLoiter (SF ↓, SE ↑)
- FBWA (SF ↑, SE ↓)
- Loiter (SF ↑, SE ·)
- RTL (SF ↑, SE ↑)
- Auto ( SC ↑ )
- RTL ( SG ↑ )

6. Air speed 센서 확인
- 미션플래너 HUD 화면 왼쪽 하단에 AS값이 변경되는지 확인
- 바람이 불지 않도록 Air speed 센서 주변을 손으로 가려준 상태에서 AS값을 확인하여 3m/s이하인지 확인
- 만약 값이 높으면 미션플래너 상단 메뉴에서 Calibration을 만족하는 값이 나올 때까지 수행

7. 쿼드모터방향 및 Stabilization 확인
- 조종기를 사용하여 비행모드를 QStable 모드로 전환
- Safety Switch를 On 상태
- 모터 시동 (ARMMING)
- 조종기를 이용한 쿼드 모터의 회전 방향은 아래와 같이 확인
- 1,2번 모터는 반시계 방향 회전, 3,4번 모터는 시계방향 회전 확인
- Roll +방향(조종기의 Aileron 키를 오른쪽)으로 전환시 2,3번 모터 출력이 1,2번보다 높아야 함
- Pitch +방향(조종기의 Elevator 키를 위쪽)으로 전환시 2,4번 모터 출력이 1,3번보다 높아야 함
- Rudder +방향(조종기의 Rudder키를 오른쪽)으로 전환시 1,2번 모터 출력이 3,4번보다 높아야 함
- Stabilization 모드에서 모터의 회전 방향은 아래와 같이 확인
- Roll +방향 회전시 1,4번 모터 출력이 2,3번보다 높아야 함
- Pitch +방향 회전시1,3번 모터 출력이 2,4번보다 높아야 함
- Rudder +방향 회전시 3,4번 모터 출력이 1,2번보다 높아야 함
- 시험 완료후 모터 시동 해제(DISARM)
* 모터 시동: 조종기 Throatle 최소 상태에서 Rudder 키를 오른쪽으로 약 3초간 유지, 모터 시동 해제는 왼쪽으로 약 3초간 유지
* Safety Switch On : 모터 시동이 가능한 상태, Safety Swithch Off: 모터 시동이 불가능한 상태
에일러론 오른쪽시(2,3번 모터가 1,2번보다 높아야 함)



8. 서보방향 확인
- 비행모드를 Action탭에서 Manual로 선택하고 SetMode 클릭
- Safety Switch On 상태
- 모터 시동 (ARMMING)
- 아래 사항을 확인
- Roll +방향(조종기의 Aileron 키를 오른쪽)으로 전환시 오른쪽 Aileron이 상승
- Pitch +방향(조종기의 Elevator 키를 위쪽)으로 전환시 Elevator 좌우 모두 하강
- Rudder +방향(조종기의 Rudder키를 오른쪽)으로 전환시 Rudder 반시계 방향(기체 위에서 바라볼 경우)
- Throatle 상승시 전방의 Pusher 모터가 반시계 방향으로 회전(기체 정면에서 바라볼 경우)
- 시험 완료후 모터 시동 해제(DISARM)



9. 서보 Stabilization 확인
- 조종기를 사용하여 비행모드를 FBWA 모드로 전환
- Safety Switch On 상태
- 모터 시동 (ARMMING)
- 아래 사항을 확인
- Roll +방향(기체를 오른쪽으로 기울임)이면 오른쪽 Aileron 하강
- Pitch +방향(기체 기수를 하강)이면 Elevator 좌우 동시 상승
- Rudder + 방향(기체를 시계방향으로 회전)이면 Rudder는 시계 방향 회전
- 시험 완료후 모터 시동 해제(DISARM)
10. 프롭 연결
- 반드시 Safety Switch OFF 상태
- 1,2번 모터는 CCW타입 프롭 연결, 3,4번은 CW타입 프롭 연결(M3렌치 사용)
- 전방의 Pusher 모터의 CCW타입 프롭 연결(스패너 사용)
- 장착후 프롭 방향이 맞는지 반드시 확인할 것
11. 비행전 미션플래너 체크
- 배터리 전압 상태 확인
- Compass 방향 확인
- 텔레메트리 수신율 확인
- GPS 상태 확인(HDOP, SAT Count, GPS Status)
- Air Speed 센서 상태 확인

12. QStable VTOL 비행 시험
- Safety Switch On 상태
- 비행모드를 QStable로 전환하고 모터시동(ARMMING)
- Throatle키를 조정하여 고도 5m이내로 상승
- 조종기 사용자가 기체 뒤에서 바라본 상태에서 아래 사항을 확인
- Roll +방향(조종기의 Aileron 키를 오른쪽)으로 전환시 기체 오른쪽 이동
- Pitch +방향(기체 기수를 하강)으로 전환시 기체 전방으로 이동
- Rudder + 방향으로 전환시 기체 시계방향으로 회전
- Throatle키를 조정하여 지면으로 랜딩후 모터시동 해제(DISARM)
13. QHover VTOL 비행 시험
- Safety Switch On 상태
- 비행모드를 QHover로 전환하고 모터시동(ARMMING)
- Throatle키를 조정하여 고도 5m이내로 상승후 Throatle키를 중립으로 약 30초이상 유지시 현재 고도가 유지되는지 확인
- Throatle키를 조정하여 지면으로 랜딩후 모터시동 해제(DISARM)
14. QLoiter VTOL 비행 시험
- Safety Switch On 상태
- 비행모드를 QLoiter로 전환하고 모터시동(ARMMING)
- Throatle키를 조정하여 고도 5m이내로 상승후 Throatle키를 중립으로 약 30초이상 유지시 현재 고도 및 위치가 유지되는지 확인
- Throatle키를 조정하여 지면으로 랜딩후 모터시동 해제(DISARM)
https://www.youtube.com/watch?v=XfamiUjpmr0&t=20s
15. AUTO모드에서 VTOLTakeOff, RTL 비행 시험
- Safety Switch On 상태, AUTO 해제( SC ↓), RTL 해제 ( SG ↓)
- 미션플래너 메뉴중 PLAN탭으로 전환후 오른쪽 메뉴에서 Load File에서 'VTakeoff_RTL.waypoints' 파일을 불러옴
- Write 클릭하여 waypoint 장입후, Read 클릭하여 불러온 waypoint 확인
- 비행모드를 QLoiter로 전환하고 모터시동(Throatle Low 상태 유지)
- AUTO키 ON( SC ↑) 전환
- 기체가 자동으로 VTOLTakeOff, RTL 미션을 정상적으로 수행하는지 확인
- 랜딩후 모터시동 해제(DISARM)
- AUTO키 해제( SC ↓) 전환
https://www.youtube.com/watch?v=98kI3-Z04_4
16. AUTO모드에서 VTOLTakeOff, Waypoint, RTL 비행 시험
- Safety Switch On 상태, AUTO 해제( SC ↓), RTL 해제 ( SG ↓)
- 미션플래너 메뉴중 PLAN탭으로 전환후 오른쪽 메뉴에서 Load File에서 'VTakeoff_FixWing_RTL.waypoints' 파일을 불러옴
- Write 클릭하여 waypoint 장입후, Read 클릭하여 불러온 waypoint 확인
- 비행모드를 QLoiter로 전환하고 모터시동(Throatle Low 상태 유지)
- AUTO키 ON( SC ↑) 전환
- 기체가 자동으로 VTOLTakeOff, Waypoint, RTL 미션을 정상적으로 수행하는지 확인
- 랜딩후 모터시동 해제(DISARM)
- AUTO키 해제( SC ↓) 전환
https://www.youtube.com/watch?v=p0t6CrC0vPQ
미션비행후 배터리 상태 및 모터 온도, 쳬결상태 확인
'엔지니어링 > 드론' 카테고리의 다른 글
| SwiftF4 FC 개발 프로젝트 (1) - 프로젝트 생성 및 디버그 환경 설정 (0) | 2024.03.16 |
|---|---|
| [STM32] VSCode에서 CrazyFlie 펌웨어 디버깅하기 (2) | 2023.12.31 |
| Hero VTOL 야외 비행시험 및 보완 (0) | 2023.10.09 |
| [STM32 자작드론] FrSky SBUS 수신기 구현 (0) | 2023.02.18 |
| [STM32 자작드론] GPS 데이터 수신기 UART DMA 구현하기 (0) | 2023.02.05 |




댓글