카메라 캘리브레이션은 카메라서버가 동작하거나 voxl-vision-px4가 동작하는 상황에서는 수행되지 않는다.
따라서 프로세스를 중단하거나 카메라를 카메라 서버를 실행하지 않은 상황에서 수행해야 한다.
yocto:/# ps
yocto:/# ps
PID USER TIME COMMAND
1 root 0:02 {systemd} /sbin/init
2 root 0:00 [kthreadd]
3 root 0:00 [ksoftirqd/0]
4 root 0:00 [kworker/0:0]
5 root 0:00 [kworker/0:0H]
6 root 0:00 [kworker/u8:0]
7 root 0:00 [rcu_preempt]
8 root 0:00 [rcu_sched]
9 root 0:00 [rcu_bh]
10 root 0:00 [migration/0]
11 root 0:00 [migration/1]
12 root 0:00 [ksoftirqd/1]
13 root 0:00 [kworker/1:0]
14 root 0:00 [kworker/1:0H]
15 root 0:00 [migration/2]
16 root 0:00 [ksoftirqd/2]
17 root 0:00 [kworker/2:0]
18 root 0:00 [kworker/2:0H]
19 root 0:00 [migration/3]
20 root 0:00 [ksoftirqd/3]
21 root 0:00 [kworker/3:0]
22 root 0:00 [kworker/3:0H]
23 root 0:00 [khelper]
24 root 0:00 [kdevtmpfs]
25 root 0:00 [netns]
26 root 0:00 [perf]
27 root 0:00 [smd_channel_clo]
28 root 0:00 [dsps_smd_trans_]
29 root 0:00 [lpass_smd_trans]
30 root 0:00 [mpss_smd_trans_]
31 root 0:00 [wcnss_smd_trans]
32 root 0:00 [rpm_smd_trans_g]
33 root 0:00 [msm_watchdog]
34 root 0:00 [kworker/2:1]
35 root 0:00 [rpm_requests]
36 root 0:00 [smem_native_mps]
37 root 0:00 [mpss_smem_glink]
38 root 0:00 [smem_native_lpa]
39 root 0:00 [lpass_smem_glin]
40 root 0:00 [smem_native_dsp]
41 root 0:00 [dsps_smem_glink]
42 root 0:00 [smem_native_rpm]
43 root 0:00 [rpm_smem_glink_]
44 root 0:00 [kworker/0:1]
45 root 0:00 [kworker/u8:1]
46 root 0:00 [deferwq]
47 root 0:00 [irq/169-cpr3]
48 root 0:00 [irq/170-cpr3_ce]
49 root 0:00 [irq/171-cpr3]
50 root 0:00 [mpm]
51 root 0:00 [kworker/u8:2]
52 root 0:00 [kworker/3:1]
53 root 0:00 [writeback]
54 root 0:00 [crypto]
55 root 0:00 [kintegrityd]
56 root 0:00 [bioset]
57 root 0:00 [kblockd]
58 root 0:00 [system]
59 root 0:00 [irq/190-arm-smm]
60 root 0:00 [irq/194-arm-smm]
61 root 0:00 [irq/197-arm-smm]
62 root 0:00 [irq/200-arm-smm]
63 root 0:00 [irq/208-arm-smm]
64 root 0:00 [irq/211-arm-smm]
65 root 0:00 [irq/214-arm-smm]
66 root 0:00 [irq/218-arm-smm]
67 root 0:00 [irq/231-arm-smm]
68 root 0:00 [irq/239-arm-smm]
69 root 0:00 [irq/244-arm-smm]
70 root 0:00 [devfreq_wq]
71 root 0:00 [governor_msm_ad]
72 root 0:00 [cfg80211]
73 root 0:00 [kworker/1:1]
74 root 0:00 [irq/97-bcl_vbat]
75 root 0:00 [irq/96-bcl_ibat]
98 root 0:00 [power_off_alarm]
99 root 0:00 [kswapd0]
100 root 0:00 [fsnotify_mark]
120 root 0:00 [glink_ssr_wq]
121 root 0:00 [glink_lbsrv]
122 root 0:00 [glink_xprt_wq]
123 root 0:00 [IPCRTR_mpss_smd]
124 root 0:00 [IPCRTR_lpass_sm]
125 root 0:00 [IPCRTR]
126 root 0:00 [IPCRTR_dsps_smd]
127 root 0:00 [IPCRTR]
128 root 0:00 [IPCRTR]
129 root 0:00 [apr_driver]
130 root 0:00 [mem_share_svc]
131 root 0:00 [qmi_hndl0000000]
132 root 0:00 [msm_ipc_router]
133 root 0:00 [glink_pkt_wq]
134 root 0:00 [qmi_svc_event_w]
135 root 0:00 [k_hsuart]
136 root 0:00 [msm_serial_hs_0]
137 root 0:00 [msm_serial_hs_0]
138 root 0:00 [hwrng]
140 root 0:00 [diag_real_time_]
141 root 0:00 [diag_wq]
142 root 0:00 [DIAG_USB_diag]
143 root 0:00 [diag_cntl_wq]
144 root 0:00 [diag_dci_wq]
145 root 0:00 [DIAG_SMD_MODEM_]
146 root 0:00 [DIAG_SMD_MODEM_]
147 root 0:00 [DIAG_SMD_MODEM_]
148 root 0:00 [DIAG_SMD_MODEM_]
149 root 0:00 [DIAG_SMD_MODEM_]
150 root 0:00 [DIAG_SMD_LPASS_]
151 root 0:00 [DIAG_SMD_LPASS_]
152 root 0:00 [DIAG_SMD_LPASS_]
153 root 0:00 [DIAG_SMD_LPASS_]
154 root 0:00 [DIAG_SMD_LPASS_]
155 root 0:00 [DIAG_SMD_WCNSS_]
156 root 0:00 [DIAG_SMD_WCNSS_]
157 root 0:00 [DIAG_SMD_WCNSS_]
158 root 0:00 [DIAG_SMD_WCNSS_]
159 root 0:00 [DIAG_SMD_WCNSS_]
160 root 0:00 [DIAG_SMD_SENSOR]
161 root 0:00 [DIAG_SMD_SENSOR]
162 root 0:00 [DIAG_SMD_SENSOR]
163 root 0:00 [DIAG_SMD_SENSOR]
164 root 0:00 [DIAG_SMD_SENSOR]
165 root 0:00 [DIAG_SOCKMODEM_]
166 root 0:00 [DIAG_SOCKMODEM_]
167 root 0:00 [DIAG_SOCKMODEM_]
168 root 0:00 [DIAG_SOCKMODEM_]
169 root 0:00 [DIAG_SOCKMODEM_]
170 root 0:00 [DIAG_SOCKLPASS_]
171 root 0:00 [DIAG_SOCKLPASS_]
172 root 0:00 [DIAG_SOCKLPASS_]
173 root 0:00 [DIAG_SOCKLPASS_]
174 root 0:00 [DIAG_SOCKLPASS_]
175 root 0:00 [DIAG_SOCKWCNSS_]
176 root 0:00 [DIAG_SOCKWCNSS_]
177 root 0:00 [DIAG_SOCKWCNSS_]
178 root 0:00 [DIAG_SOCKWCNSS_]
179 root 0:00 [DIAG_SOCKWCNSS_]
180 root 0:00 [DIAG_SOCKSENSOR]
181 root 0:00 [DIAG_SOCKSENSOR]
182 root 0:00 [DIAG_SOCKSENSOR]
183 root 0:00 [DIAG_SOCKSENSOR]
184 root 0:00 [DIAG_SOCKSENSOR]
185 root 0:00 [DIAG_CNTL_SOCKE]
186 root 0:00 [kgsl-workqueue]
187 root 0:00 [kgsl-mementry]
188 root 0:00 [kgsl_worker_thr]
189 root 0:00 [kgsl-events]
190 root 0:00 [kgsl_devfreq_wq]
191 root 0:00 [qcrypto_seq_res]
212 root 0:00 [scsi_eh_0]
213 root 0:00 [scsi_tmf_0]
214 root 0:00 [ufs_pm_qos_0]
215 root 0:00 [ufs_clk_ungatin]
216 root 0:00 [ufs_clkscaling_]
217 root 0:00 [bond0]
218 root 0:00 [usbnet]
219 root 0:00 [qcqmi0]
220 root 0:00 [qcqmi1]
221 root 0:00 [qcqmi2]
222 root 0:00 [qcqmi3]
223 root 0:00 [sharedmem_qmi_w]
224 root 0:00 [qmi_hndl0000000]
225 root 0:00 [kworker/u8:3]
226 root 0:00 [kworker/u8:4]
227 root 0:00 [k_sm_usb]
231 root 0:00 [k_sm_usb]
232 root 0:00 [irq/83-hs_phy_i]
233 root 0:00 [irq/84-msm_dwc3]
234 root 0:00 [ks_usb_bridge.0]
235 root 0:00 [kworker/u8:5]
236 root 0:00 [ks_usb_bridge.1]
237 root 0:00 [ks_usb_bridge.2]
238 root 0:00 [ks_usb_bridge.3]
239 root 0:00 [k_gserial]
240 root 0:00 [k_ipa_usb]
241 root 0:00 [uether]
242 root 0:00 [k_gbridge]
243 root 0:00 [kworker/u8:6]
244 root 0:00 [kworker/u8:7]
245 root 0:00 [kworker/u8:8]
246 root 0:00 [kworker/u8:9]
247 root 0:00 [kworker/u8:10]
248 root 0:00 [msm_vidc_worker]
249 root 0:00 [pm_workerq_venu]
250 root 0:00 [irq/201-arm-smm]
251 root 0:00 [irq/202-arm-smm]
252 root 0:00 [irq/203-arm-smm]
253 root 0:00 [irq/204-arm-smm]
254 root 0:00 [msm_cci_wq]
255 root 0:00 [msm_cci_wq]
256 root 0:00 [msm_cpp_workque]
257 root 0:00 [kworker/u9:0]
258 root 0:00 [irq/140-soft-co]
259 root 0:00 [irq/141-soft-ho]
260 root 0:00 [irq/146-batt-mi]
261 root 0:00 [therm_core:noti]
262 root 0:00 [therm_core:noti]
263 root 0:00 [therm_core:noti]
264 root 0:00 [therm_core:noti]
265 root 0:00 [therm_core:noti]
266 root 0:00 [therm_core:noti]
267 root 0:00 [therm_core:noti]
268 root 0:00 [therm_core:noti]
269 root 0:00 [therm_core:noti]
270 root 0:00 [therm_core:noti]
271 root 0:00 [therm_core:noti]
272 root 0:00 [therm_core:noti]
273 root 0:00 [therm_core:noti]
274 root 0:00 [therm_core:noti]
275 root 0:00 [irq/154-tsens_i]
276 root 0:00 [irq/155-tsens_c]
277 root 0:00 [therm_core:noti]
278 root 0:00 [therm_core:noti]
279 root 0:00 [therm_core:noti]
280 root 0:00 [therm_core:noti]
281 root 0:00 [therm_core:noti]
282 root 0:00 [therm_core:noti]
283 root 0:00 [therm_core:noti]
284 root 0:00 [therm_core:noti]
285 root 0:00 [irq/259-tsens_i]
286 root 0:00 [irq/260-tsens_c]
287 root 0:00 [therm_core:noti]
288 root 0:00 [therm_core:noti]
289 root 0:00 [therm_core:noti]
290 root 0:00 [therm_core:noti]
291 root 0:00 [therm_core:noti]
292 root 0:00 [therm_core:noti]
293 root 0:00 [therm_core:noti]
294 root 0:00 [dm_bufio_cache]
295 root 0:00 [cfinteractive]
296 root 0:00 [irq/150-qpnp_wl]
297 root 0:00 [binder]
298 root 0:00 [irq/26-74a4900.]
299 root 0:00 [kworker/3:2]
300 root 0:00 [irq/25-mmc0]
301 root 0:00 [irq/300-74a4900]
302 root 0:00 [irq/10-spdm_bw_]
303 root 0:00 [ipv6_addrconf]
304 root 0:00 [krfcommd]
305 root 0:00 [irq/575-adsp]
306 root 0:00 [sysmon_wq]
307 root 0:00 [adsp]
308 root 0:00 [sys_mon]
309 root 0:00 [irq/607-slpi]
310 root 0:00 [slpi]
311 root 0:00 [sys_mon]
312 root 0:00 [irq/543-modem]
313 root 0:00 [k_sm_usb]
314 root 0:00 [irq/80-hs_phy_i]
315 root 0:00 [irq/81-ss_phy_i]
316 root 0:00 [irq/82-msm_dwc3]
317 root 0:00 [usb_bam_wq]
318 root 0:00 [therm_core:noti]
319 root 0:00 [irq/101-chg-err]
320 root 0:00 [irq/107-chg-tap]
321 root 0:00 [irq/108-chg-tcc]
322 root 0:00 [irq/106-chg-rec]
323 root 0:00 [irq/105-chg-p2f]
324 root 0:00 [irq/109-batt-ho]
325 root 0:00 [irq/110-batt-wa]
326 root 0:00 [irq/112-batt-co]
327 root 0:00 [irq/111-batt-co]
328 root 0:00 [irq/115-batt-mi]
329 root 0:00 [irq/114-batt-lo]
330 root 0:00 [irq/117-usbin-u]
331 root 0:00 [irq/118-usbin-o]
332 root 0:00 [irq/119-usbin-s]
333 root 0:00 [irq/122-aicl-do]
334 root 0:00 [irq/120-otg-fai]
335 root 0:00 [irq/121-otg-oc]
336 root 0:00 [irq/123-usbid-c]
337 root 0:00 [irq/124-dcin-uv]
338 root 0:00 [irq/126-power-o]
339 root 0:00 [irq/127-temp-sh]
340 root 0:00 [irq/128-wdog-ti]
341 root 0:00 [rq_stats]
342 root 0:00 [msm_perf:events]
343 root 0:00 [FILE_FREE]
344 root 0:00 [irq/219-arm-smm]
345 root 0:00 [irq/220-arm-smm]
346 root 0:00 [irq/221-arm-smm]
347 root 0:00 [irq/222-arm-smm]
348 root 0:00 [irq/223-arm-smm]
349 root 0:00 [irq/224-arm-smm]
350 root 0:00 [irq/225-arm-smm]
351 root 0:00 [irq/226-arm-smm]
352 root 0:00 [sb-1]
353 root 0:00 [ngd_rx_thread1]
354 root 0:00 [ngd_notify_sl1]
355 root 0:00 [k_bam_data]
356 root 0:00 [f_mtp]
357 root 0:00 [kworker/3:1H]
358 root 0:00 [msm-core:sampli]
359 root 0:00 [therm_core:noti]
360 root 0:00 [therm_core:noti]
361 root 0:00 [therm_core:noti]
362 root 0:00 [therm_core:noti]
363 root 0:00 [therm_core:noti]
364 root 0:00 [therm_core:noti]
365 root 0:00 [therm_core:noti]
366 root 0:00 [therm_core:noti]
367 root 0:00 [irq/168-lmh-int]
368 root 0:00 [jbd2/sde18-8]
369 root 0:00 [ext4-rsv-conver]
370 root 0:00 [kworker/0:1H]
371 root 0:00 [kworker/2:1H]
384 root 0:00 [kauditd]
388 root 0:00 /lib/systemd/systemd-journald
390 root 0:00 [kworker/3:3]
395 root 0:00 [kworker/1:2]
402 root 0:00 [kworker/0:2]
409 root 0:00 [kworker/3:4]
411 root 0:00 [kworker/1:3]
419 root 0:00 [kworker/1:4]
432 root 0:01 /lib/systemd/systemd-udevd
442 root 0:00 [kworker/2:2]
467 root 0:00 [kworker/1:1H]
480 root 0:00 [kworker/0:3]
1086 root 0:00 [jbd2/sda3-8]
1099 root 0:00 [ext4-rsv-conver]
1873 root 0:00 [jbd2/sda2-8]
1874 root 0:00 [ext4-rsv-conver]
1876 root 0:00 [jbd2/sde12-8]
1877 root 0:00 [ext4-rsv-conver]
1942 root 0:00 /usr/bin/servicemanager
1952 root 0:40 /system/bin/mm-qcamera-daemon
1956 root 0:00 /usr/bin/qmmf-webserver
1957 messageb 0:00 /usr/bin/dbus-daemon --system --address=systemd: --nofork
1987 system 0:00 /usr/bin/qseecomd
1991 system 0:01 /sbin/logd
1993 system 0:00 /usr/bin/qseecomd
2012 root 0:00 /usr/bin/thermal-engine
2032 root 0:00 /usr/bin/sdsprpcd
2045 diag 0:00 /usr/bin/diagrebootapp
2058 root 0:00 /usr/sbin/chronyd
2104 root 0:00 [jbd2/sda9-8]
2120 root 0:00 [ext4-rsv-conver]
2149 root 0:00 /usr/bin/adsprpcd
2154 root 0:00 [irq/16-408000.q]
2160 root 0:00 [kworker/2:2H]
2161 root 0:00 /sbin/reboot-daemon
2164 root 0:00 wlan_services
2175 root 0:00 /lib/systemd/systemd-logind
2187 root 0:00 [kworker/2:3]
2188 root 0:20 /usr/bin/voxl-qvio-server
2196 root 0:00 /usr/bin/qti
2210 root 0:00 /usr/bin/loc_launcher
2222 root 0:00 [msm_thermal:hot]
2228 nobody 0:00 /usr/bin/dnsmasq -7 /etc/dnsmasq.d
2229 root 0:00 [msm_thermal:fre]
2232 root 0:00 [msm_thermal:the]
2297 root 0:00 [loc_launcher]
2298 root 0:00 [loc_launcher]
2304 root 0:00 [loc_launcher]
2305 root 0:00 [loc_launcher]
2309 root 0:00 [dsps_IPCRTR]
2310 root 0:00 [LOOPBACK]
2324 root 0:01 /sbin/leprop-service
2326 root 0:00 /usr/bin/qmmf-server
2347 root 0:00 /sbin/tftp_server
2361 root 0:00 [qmi_hndl0000000]
2399 root 0:27 /usr/bin/voxl-camera-server -c /etc/modalai/voxl-camera-s
2403 root 0:00 /sbin/rmt_storage
2404 root 0:00 /sbin/init_mss
2405 root 0:00 /usr/bin/qmi_shutdown_modem
2424 root 0:00 [irq/227-arm-smm]
2430 root 0:00 [lpass_IPCRTR]
2431 root 0:00 /sbin/adbd
2432 root 0:00 [LOOPBACK]
2443 root 0:00 /usr/bin/qti_system_daemon
2487 root 0:00 [msm_slim_qmi_cl]
2488 root 0:00 [qmi_hndl0000000]
2493 root 0:00 [qmi_hndl0000000]
2532 root 0:00 [wlan_logging_th]
2543 root 0:00 [VosWDThread]
2545 root 0:00 [VosMCThread]
2546 root 0:00 [VosTlshimRxThre]
2613 root 0:00 [mpss_IPCRTR]
2618 root 0:00 [SSM_RTR_MODEM_A]
2646 root 0:00 [kworker/u8:11]
2647 root 0:00 [qmi_hndl0000000]
2656 root 0:00 [kworker/u8:12]
2692 root 0:00 [kworker/u8:13]
2696 root 0:00 [LOOPBACK]
2750 root 0:00 wpa_supplicant -Dnl80211 -iwlan0 -c /data/misc/wifi/wpa_s
2810 root 0:00 /usr/sbin/dhcpcd wlan0 -t 0 -o domain_name_servers --noip
2856 root 0:00 /sbin/reboot-daemon
2867 root 0:00 [irq/195-arm-smm]
2868 root 0:00 [irq/196-arm-smm]
2949 root 0:04 /usr/bin/voxl-vision-px4
2960 root 0:01 /usr/bin/voxl-imu-server
3192 root 0:00 [irq/198-arm-smm]
3288 root 0:00 [irq/215-arm-smm]
3347 root 0:00 [kworker/0:4]
3362 root 0:00 {sh} /bin/busybox /bin/sh -
3364 root 0:00 bash
3370 root 0:00 {ps} /bin/busybox /bin/ps
yocto:/# kill 2949
yocto:/#
yocto:/#
yocto:/#
yocto:/# roslaunch voxl_cam_ros stereo.launch
... logging to /home/root/.ros/log/88d790b2-9fde-11eb-9b36-ec5c68cd25a1/roslaunch-apq8096-3372.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.219.101:40474/
SUMMARY
========
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.21
* /stereo/stereo_cam_nodelet/cam_id: 2
* /stereo/stereo_cam_nodelet/cam_name: stereo
* /stereo/stereo_cam_nodelet/format: 1
* /stereo/stereo_cam_nodelet/frame_id: left_stereo
* /stereo/stereo_cam_nodelet/frame_id_right: right_stereo
* /stereo/stereo_cam_nodelet/frame_rate: 15
* /stereo/stereo_cam_nodelet/height: 480
* /stereo/stereo_cam_nodelet/is_cam_master: True
* /stereo/stereo_cam_nodelet/is_stereo: True
* /stereo/stereo_cam_nodelet/skip_n_frames: 0
* /stereo/stereo_cam_nodelet/width: 640
NODES
/stereo/
stereo_cam_nodelet (nodelet/nodelet)
stereo_nodelet_manager (nodelet/nodelet)
auto-starting new master
process[master]: started with pid [3391]
ROS_MASTER_URI=http://localhost:11311/
setting /run_id to 88d790b2-9fde-11eb-9b36-ec5c68cd25a1
process[rosout-1]: started with pid [3404]
started core service [/rosout]
process[stereo/stereo_nodelet_manager-2]: started with pid [3407]
process[stereo/stereo_cam_nodelet-3]: started with pid [3417]
[ INFO] [1618706370.424220035]: Initializing nodelet with 4 worker threads.
[ INFO] [1618706370.645674482]: SnapCamDriver Starting
[ INFO] [1618706370.645870836]: Monotonic offset: 1618706282.938460681
ERROR: Could not open camera 2
[ERROR] [1618706371.571829257]: CameraManager::Initialize() failed
[ERROR] [1618706371.572031706]: Unable to open camera.
^C[stereo/stereo_cam_nodelet-3] killing on exit
[stereo/stereo_nodelet_manager-2] killing on exit
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
yocto:/# roslaunch voxl_cam_ros stereo.launch
... logging to /home/root/.ros/log/b4f695f8-9fde-11eb-9a09-ec5c68cd25a1/roslaunch-apq8096-3683.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.219.101:57779/
SUMMARY
========
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.21
* /stereo/stereo_cam_nodelet/cam_id: 2
* /stereo/stereo_cam_nodelet/cam_name: stereo
* /stereo/stereo_cam_nodelet/format: 1
* /stereo/stereo_cam_nodelet/frame_id: left_stereo
* /stereo/stereo_cam_nodelet/frame_id_right: right_stereo
* /stereo/stereo_cam_nodelet/frame_rate: 15
* /stereo/stereo_cam_nodelet/height: 480
* /stereo/stereo_cam_nodelet/is_cam_master: True
* /stereo/stereo_cam_nodelet/is_stereo: True
* /stereo/stereo_cam_nodelet/skip_n_frames: 0
* /stereo/stereo_cam_nodelet/width: 640
NODES
/stereo/
stereo_cam_nodelet (nodelet/nodelet)
stereo_nodelet_manager (nodelet/nodelet)
auto-starting new master
process[master]: started with pid [3702]
ROS_MASTER_URI=http://localhost:11311/
setting /run_id to b4f695f8-9fde-11eb-9a09-ec5c68cd25a1
process[rosout-1]: started with pid [3715]
started core service [/rosout]
process[stereo/stereo_nodelet_manager-2]: started with pid [3728]
process[stereo/stereo_cam_nodelet-3]: started with pid [3733]
[ INFO] [1618706444.335732633]: Initializing nodelet with 4 worker threads.
[ INFO] [1618706444.545887346]: SnapCamDriver Starting
[ INFO] [1618706444.546176936]: Monotonic offset: 1618706282.938459692
libcam.enable.publish 1
libcam.enable.publish.dump 0
libcam.publish.buffer.policy max
libcam.publish.buffer.max 3
libcam.debug.level info
libcam.dump.dir /data/misc/camera/dumps
Opened camera 2 Type: 2
Preview FPS range 0: [ 15, 15 ]
Preview FPS range 1: [ 20, 20 ]
Preview FPS range 2: [ 24, 24 ]
Preview FPS range 3: [ 7, 30 ]
Preview FPS range 4: [ 30, 30 ]
Preview FPS range 5: [ 60, 60 ]
Preview FPS range 6: [ 90, 90 ]
Preview FPS range 7: [ 120, 120 ]
Preview size 0: [ 1280 x 480 ]
Preview size 1: [ 848 x 480 ]
Preview size 2: [ 858 x 480 ]
Preview size 3: [ 864 x 480 ]
Preview size 4: [ 800 x 480 ]
Preview size 5: [ 720 x 480 ]
Preview size 6: [ 640 x 480 ]
Preview size 7: [ 640 x 240 ]
Preview size 8: [ 640 x 360 ]
Preview size 9: [ 480 x 480 ]
Preview size 10: [ 480 x 360 ]
Preview size 11: [ 480 x 320 ]
Preview size 12: [ 432 x 240 ]
Preview size 13: [ 352 x 288 ]
Preview size 14: [ 320 x 240 ]
Preview format 0: nv12-venus
Preview format 1: raw10
Preview format 2: raw12
Setting FPS to 15
Setting preview size to 1280x480
Using default preview format of YUV_FORMAT
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.957118254]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.957483992]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.957722018]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.958058225]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.958321304]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.958706834]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.959074500]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.959572793]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.959957334]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.960321197]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.960775740]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.961211896]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.961643001]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.962512137]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.964239627]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.965481429]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.969060944]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.974124246]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.979781052]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.981394738]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.984838729]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.986779975]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.988907058]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.989367017]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.990384386]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.990810334]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.991385765]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.991787806]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.992343393]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.992776789]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.993344355]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.994395683]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.995412739]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.996252187]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.998992255]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.999394192]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706446.999885298]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.000219629]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.000544064]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.001042878]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.001650914]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.002011704]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.002336764]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.002661876]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.002990270]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.003531846]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.004040244]: GetImageData() Unable to get Frame data for id: 0 rc: -2
ERROR: The requested frame_id(0) does not exist in the queue.
[ERROR] [1618706447.004902765]: GetImageData() Unable to get Frame data for id: 0 rc: -2
[ INFO] [1618706447.010538998]: camera calibration URL: file:///home/root/.ros/camera_info/left.yaml
[ INFO] [1618706447.014303518]: Unable to open camera calibration file [/home/root/.ros/camera_info/left.yaml]
[ WARN] [1618706447.014573733]: Camera calibration file /home/root/.ros/camera_info/left.yaml not found.
[ INFO] [1618706447.014934575]: camera calibration URL: file:///home/root/.ros/camera_info/right.yaml
[ INFO] [1618706447.015185050]: Unable to open camera calibration file [/home/root/.ros/camera_info/right.yaml]
[ WARN] [1618706447.015353491]: Camera calibration file /home/root/.ros/camera_info/right.yaml not found.

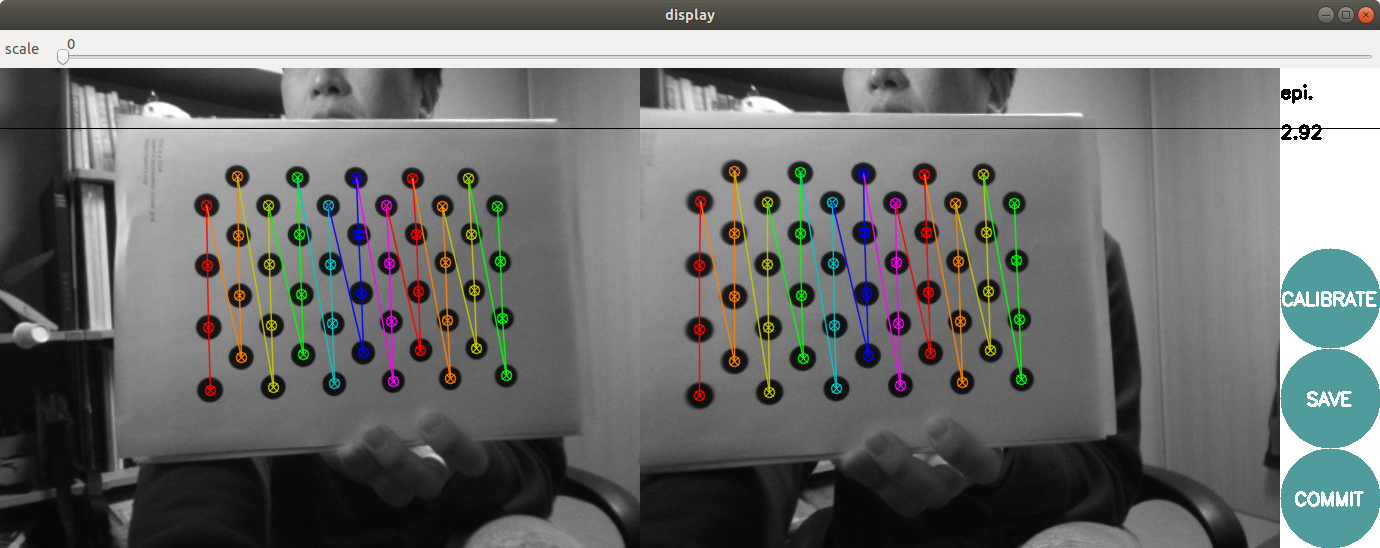
swift@swift-HP-Pavilion-dv6-Notebook-PC:~/workspace/git/voxl-camera-calibratio rosrun camera_calibration cameracalibrator.py --camera_name=stereo --no-service-check --pattern 'acircles' --size 4x11 --square 0.060 right:=/stereo/right/image_raw left:=/stereo/left/image_raw right_camera:=/stereo/right left_camera:=/stereo/left
Using plumb_bob model
CUSTOM CALIBRATOR, with ModalAI Fisheye Patch
CUSTOM CALIBRATOR, with ModalAI Fisheye Patch
*** Added sample 1, p_x = 0.522, p_y = 0.754, p_size = 0.393, skew = 0.044
*** Added sample 2, p_x = 0.470, p_y = 0.716, p_size = 0.232, skew = 0.095
*** Added sample 3, p_x = 0.315, p_y = 0.694, p_size = 0.266, skew = 0.063
*** Added sample 4, p_x = 0.458, p_y = 0.861, p_size = 0.210, skew = 0.139
*** Added sample 5, p_x = 0.527, p_y = 0.922, p_size = 0.222, skew = 0.021
*** Added sample 6, p_x = 0.699, p_y = 0.686, p_size = 0.225, skew = 0.030
*** Added sample 7, p_x = 0.380, p_y = 0.826, p_size = 0.303, skew = 0.039
*** Added sample 8, p_x = 0.505, p_y = 0.629, p_size = 0.204, skew = 0.002
*** Added sample 9, p_x = 0.497, p_y = 0.425, p_size = 0.231, skew = 0.055
*** Added sample 10, p_x = 0.501, p_y = 0.196, p_size = 0.232, skew = 0.070
*** Added sample 11, p_x = 0.553, p_y = 0.100, p_size = 0.227, skew = 0.122
*** Added sample 12, p_x = 0.742, p_y = 0.443, p_size = 0.219, skew = 0.029
*** Added sample 13, p_x = 0.942, p_y = 0.367, p_size = 0.199, skew = 0.079
*** Added sample 14, p_x = 0.287, p_y = 0.417, p_size = 0.220, skew = 0.050
*** Added sample 15, p_x = 0.465, p_y = 0.511, p_size = 0.238, skew = 0.141
*** Added sample 16, p_x = 0.529, p_y = 0.434, p_size = 0.229, skew = 0.612
*** Added sample 17, p_x = 0.399, p_y = 0.414, p_size = 0.252, skew = 0.220
*** Added sample 18, p_x = 0.364, p_y = 0.394, p_size = 0.213, skew = 0.423
*** Added sample 19, p_x = 0.415, p_y = 0.371, p_size = 0.252, skew = 0.003
*** Added sample 20, p_x = 0.385, p_y = 0.515, p_size = 0.276, skew = 0.014
*** Added sample 21, p_x = 0.419, p_y = 0.536, p_size = 0.237, skew = 0.292
*** Added sample 22, p_x = 0.444, p_y = 0.505, p_size = 0.138, skew = 0.067
*** Added sample 23, p_x = 0.573, p_y = 0.539, p_size = 0.276, skew = 0.053
*** Added sample 24, p_x = 0.650, p_y = 0.615, p_size = 0.345, skew = 0.058
*** Added sample 25, p_x = 0.613, p_y = 0.730, p_size = 0.438, skew = 0.085
*** Added sample 26, p_x = 0.588, p_y = 0.652, p_size = 0.493, skew = 0.130
*** Added sample 27, p_x = 0.705, p_y = 0.504, p_size = 0.454, skew = 0.072
*** Added sample 28, p_x = 0.636, p_y = 0.289, p_size = 0.427, skew = 0.075
*** Added sample 29, p_x = 0.820, p_y = 0.343, p_size = 0.578, skew = 0.126
*** Added sample 30, p_x = 0.867, p_y = 0.469, p_size = 0.538, skew = 0.116
*** Added sample 31, p_x = 0.521, p_y = 0.326, p_size = 0.436, skew = 0.019
Stero Calibration, calculating left intrinsics
09:50:22.954155
Using instrinsic guess
Stero Calibration, calculating right intrinsics
09:50:29.196514
Using instrinsic guess
Stero Calibration, calculating extrinsics
09:50:36.524535
09:50:36.824588
Left:
('D = ', [-0.26860868120245057, 0.1384645141278852, 0.0015467683030392899, -0.004746457028995454, 0.0])
('K = ', [518.5738984547745, 0.0, 303.24322850054904, 0.0, 519.8969388488181, 260.8642551060417, 0.0, 0.0, 1.0])
('R = ', [0.9831884173745934, 0.020291854778359125, -0.18146287931722052, -0.021067013048730647, 0.99977531550358, -0.0023450950773279723, 0.1813745210928116, 0.006128551164107152, 0.9833949989495484])
('P = ', [559.4607254231372, 0.0, 403.0106506347656, 0.0, 0.0, 559.4607254231372, 247.8971824645996, 0.0, 0.0, 0.0, 1.0, 0.0])
Right:
('D = ', [-0.30876149210819576, 0.17610557002907343, -0.007369921247393671, -0.012238197060813001, 0.0])
('K = ', [525.6560836705897, 0.0, 329.7390883982051, 0.0, 528.8670329327315, 240.924497272156, 0.0, 0.0, 1.0])
('R = ', [0.9938828092240057, 0.03751772312566512, -0.10387194992135468, -0.03707475660090932, 0.999293306824227, 0.006192685950737236, 0.10403087980009496, -0.002303776848364695, 0.9945713994783136])
('P = ', [559.4607254231372, 0.0, 403.0106506347656, -145.81058597416708, 0.0, 559.4607254231372, 247.8971824645996, 0.0, 0.0, 0.0, 1.0, 0.0])
('self.T ', [-0.25903272243640907, -0.00977813266379391, 0.027071837567967046])
('self.R ', [0.9968236716404613, -0.016261142276909536, -0.07796244550474328, 0.015417019266468901, 0.9998159664858022, -0.011417034509827385, 0.07813375182446629, 0.010178821734924338, 0.9968909210209116])
None
# oST version 5.0 parameters
[image]
width
640
height
480
[stereo/left]
camera matrix
518.573898 0.000000 303.243229
0.000000 519.896939 260.864255
0.000000 0.000000 1.000000
distortion
-0.268609 0.138465 0.001547 -0.004746 0.000000
rectification
0.983188 0.020292 -0.181463
-0.021067 0.999775 -0.002345
0.181375 0.006129 0.983395
projection
559.460725 0.000000 403.010651 0.000000
0.000000 559.460725 247.897182 0.000000
0.000000 0.000000 1.000000 0.000000
# oST version 5.0 parameters
[image]
width
640
height
480
[stereo/right]
camera matrix
525.656084 0.000000 329.739088
0.000000 528.867033 240.924497
0.000000 0.000000 1.000000
distortion
-0.308761 0.176106 -0.007370 -0.012238 0.000000
rectification
0.993883 0.037518 -0.103872
-0.037075 0.999293 0.006193
0.104031 -0.002304 0.994571
projection
559.460725 0.000000 403.010651 -145.810586
0.000000 559.460725 247.897182 0.000000
0.000000 0.000000 1.000000 0.000000
('Wrote calibration data to', '/tmp/calibrationdata.tar.gz')
Left:
('D = ', [-0.26860868120245057, 0.1384645141278852, 0.0015467683030392899, -0.004746457028995454, 0.0])
('K = ', [518.5738984547745, 0.0, 303.24322850054904, 0.0, 519.8969388488181, 260.8642551060417, 0.0, 0.0, 1.0])
('R = ', [0.9831884173745934, 0.020291854778359125, -0.18146287931722052, -0.021067013048730647, 0.99977531550358, -0.0023450950773279723, 0.1813745210928116, 0.006128551164107152, 0.9833949989495484])
('P = ', [559.4607254231372, 0.0, 403.0106506347656, 0.0, 0.0, 559.4607254231372, 247.8971824645996, 0.0, 0.0, 0.0, 1.0, 0.0])
Right:
('D = ', [-0.30876149210819576, 0.17610557002907343, -0.007369921247393671, -0.012238197060813001, 0.0])
('K = ', [525.6560836705897, 0.0, 329.7390883982051, 0.0, 528.8670329327315, 240.924497272156, 0.0, 0.0, 1.0])
('R = ', [0.9938828092240057, 0.03751772312566512, -0.10387194992135468, -0.03707475660090932, 0.999293306824227, 0.006192685950737236, 0.10403087980009496, -0.002303776848364695, 0.9945713994783136])
('P = ', [559.4607254231372, 0.0, 403.0106506347656, -145.81058597416708, 0.0, 559.4607254231372, 247.8971824645996, 0.0, 0.0, 0.0, 1.0, 0.0])
('self.T ', [-0.25903272243640907, -0.00977813266379391, 0.027071837567967046])
('self.R ', [0.9968236716404613, -0.016261142276909536, -0.07796244550474328, 0.015417019266468901, 0.9998159664858022, -0.011417034509827385, 0.07813375182446629, 0.010178821734924338, 0.9968909210209116])
# oST version 5.0 parameters
[image]
width
640
height
480
[stereo/left]
camera matrix
518.573898 0.000000 303.243229
0.000000 519.896939 260.864255
0.000000 0.000000 1.000000
distortion
-0.268609 0.138465 0.001547 -0.004746 0.000000
rectification
0.983188 0.020292 -0.181463
-0.021067 0.999775 -0.002345
0.181375 0.006129 0.983395
projection
559.460725 0.000000 403.010651 0.000000
0.000000 559.460725 247.897182 0.000000
0.000000 0.000000 1.000000 0.000000
# oST version 5.0 parameters
[image]
width
640
height
480
[stereo/right]
camera matrix
525.656084 0.000000 329.739088
0.000000 528.867033 240.924497
0.000000 0.000000 1.000000
distortion
-0.308761 0.176106 -0.007370 -0.012238 0.000000
rectification
0.993883 0.037518 -0.103872
-0.037075 0.999293 0.006193
0.104031 -0.002304 0.994571
projection
559.460725 0.000000 403.010651 -145.810586
0.000000 559.460725 247.897182 0.000000
0.000000 0.000000 1.000000 0.000000
swift@swift-HP-Pavilion-dv6-Notebook-PC:~/workspace/git/voxl-camera-calibration$
저장된 캘리브레이션 결과를 VOXL에 넣어준다.
swift@swift-HP-Pavilion-dv6-Notebook-PC:~/workspace/git/voxl-camera-calibration$ ./push_stereo_cal_to_voxl.sh
Generating SNAV stereo camera calibration . . .
('Left Image Width: ', 640)
('Left Image Height: ', 480)
('Left Principal Point X:', 303.243229)
('Left Principal Point Y:', 260.864255)
('Left Focal Length X:', 518.573898)
('Left Focal Length Y:', 519.896939)
('Left Distortion Ceoffs:', [-0.268609, 0.138465, 0.001547, -0.004746, 0.0])
('Right Image Width: ', 640)
('Right Image Height: ', 480)
('Right Principal Point X:', 329.739088)
('Right Principal Point Y:', 240.924497)
('Right Focal Length X:', 525.656084)
('Right Focal Length Y:', 528.867033)
('Right Distortion Coeffs:', [-0.308761, 0.176106, -0.00737, -0.012238, 0.0])
('Extrinsic translation:', array([-0.25903277, -0.0097782 , 0.02707185]))
('Extrinsic rotation:', [0.010810954094894342, -0.078139143917156276, 0.015857649154350305])
/tmp/calibrationdata/calibration.stere...ushed. 0.8 MB/s (2524 bytes in 0.003s)
/tmp/calibrationdata/left.yaml: 1 file pushed. 0.2 MB/s (656 bytes in 0.003s)
/tmp/calibrationdata/right.yaml: 1 fil...pushed. 0.2 MB/s (661 bytes in 0.003s)
/tmp/calibrationdata/opencv_stereo_int...pushed. 0.1 MB/s (784 bytes in 0.009s)
/tmp/calibrationdata/opencv_stereo_ext...pushed. 0.3 MB/s (466 bytes in 0.002s)
DONE
swift@swift-HP-Pavilion-dv6-Notebook-PC:~/workspace/git/voxl-camera-calibration$
캘리브레이션 결과는 VOXL에서 아래 파일로 확인할 수 있다.
yocto:/# ls /home/root/.ros/camera_info/
left.yaml right.yaml tracking.yaml
yocto:/# cat /home/root/.ros/camera_info/right.yaml
image_width: 640
image_height: 480
camera_name: stereo/right
camera_matrix:
rows: 3
cols: 3
data: [525.656084, 0.000000, 329.739088, 0.000000, 528.867033, 240.924497, 0.000000, 0.000000, 1.000000]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [-0.308761, 0.176106, -0.007370, -0.012238, 0.000000]
rectification_matrix:
rows: 3
cols: 3
data: [0.993883, 0.037518, -0.103872, -0.037075, 0.999293, 0.006193, 0.104031, -0.002304, 0.994571]
projection_matrix:
rows: 3
cols: 4
data: [559.460725, 0.000000, 403.010651, -145.810586, 0.000000, 559.460725, 247.897182, 0.000000, 0.000000, 0.000000, 1.000000, 0.000000]
yocto:/#
yocto:/#
yocto:/# cat /home/root/.ros/camera_info/left.yaml
image_width: 640
image_height: 480
camera_name: stereo/left
camera_matrix:
rows: 3
cols: 3
data: [518.573898, 0.000000, 303.243229, 0.000000, 519.896939, 260.864255, 0.000000, 0.000000, 1.000000]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [-0.268609, 0.138465, 0.001547, -0.004746, 0.000000]
rectification_matrix:
rows: 3
cols: 3
data: [0.983188, 0.020292, -0.181463, -0.021067, 0.999775, -0.002345, 0.181375, 0.006129, 0.983395]
projection_matrix:
rows: 3
cols: 4
data: [559.460725, 0.000000, 403.010651, 0.000000, 0.000000, 559.460725, 247.897182, 0.000000, 0.000000, 0.000000, 1.000000, 0.000000]
yocto:/#
yocto:/#
yocto:/#
yocto:/# ls /etc/snav/
calibration.stereo.xml
yocto:/#
yocto:/#
yocto:/# cat /etc/snav/calibration.stereo.xml
<SnavCalibration>
<SnavCalibrationStereo>
<SnavCalibrationLeftStereo>
<param name="calib_pixel_width" value="640" />
<param name="calib_pixel_height" value="480" />
<param name="calib_memory_stride" value="640" />
<param name="principal_point_x" value="303.243229" />
<param name="principal_point_y" value="260.864255" />
<param name="focal_length_x" value="518.573898" />
<param name="focal_length_y" value="519.896939" />
<param name="distortion_0" value="-0.268609" />
<param name="distortion_1" value="0.138465" />
<param name="distortion_2" value="0.001547" />
<param name="distortion_3" value="-0.004746" />
<param name="distortion_4" value="0.0" />
<param name="distortion_5" value="0.0" />
<param name="distortion_6" value="0.0" />
<param name="distortion_7" value="0.0" />
<param name="distortion_model" value="4" />
</SnavCalibrationLeftStereo>
<SnavCalibrationRightStereo>
<param name="calib_pixel_width" value="640" />
<param name="calib_pixel_height" value="480" />
<param name="calib_memory_stride" value="640" />
<param name="principal_point_x" value="329.739088" />
<param name="principal_point_y" value="240.924497" />
<param name="focal_length_x" value="525.656084" />
<param name="focal_length_y" value="528.867033" />
<param name="distortion_0" value="-0.308761" />
<param name="distortion_1" value="0.176106" />
<param name="distortion_2" value="-0.00737" />
<param name="distortion_3" value="-0.012238" />
<param name="distortion_4" value="0.0" />
<param name="distortion_5" value="0.0" />
<param name="distortion_6" value="0.0" />
<param name="distortion_7" value="0.0" />
<param name="distortion_model" value="4" />
</SnavCalibrationRightStereo>
<param name="correction_factors_0" value="0" />
<param name="correction_factors_1" value="0" />
<param name="correction_factors_2" value="0" />
<param name="correction_factors_3" value="0" />
<param name="translation_0" value="-0.259032772399596" />
<param name="translation_1" value="-0.00977820483385675" />
<param name="translation_2" value="0.0270718506450868" />
<param name="rotation_0" value="0.0108109540948943" />
<param name="rotation_1" value="-0.0781391439171563" />
<param name="rotation_2" value="0.0158576491543503" />
</SnavCalibrationStereo>
</SnavCalibration>yocto:/#
'엔지니어링 > 드론' 카테고리의 다른 글
| [ VOXL ] pDDL 데이터링크 기능 확인하기 (0) | 2021.04.25 |
|---|---|
| [ VOXL ] VIsual Odometry (0) | 2021.04.18 |
| [ VOXL ] Unbrick (0) | 2021.04.17 |
| [ VOXL ] VOXL Development Kit 확인 (0) | 2021.04.09 |
| [ VOXL ] VOA(Visual Obstacle Avoidance) 의 stereo camera calibration (2) | 2021.04.04 |

댓글