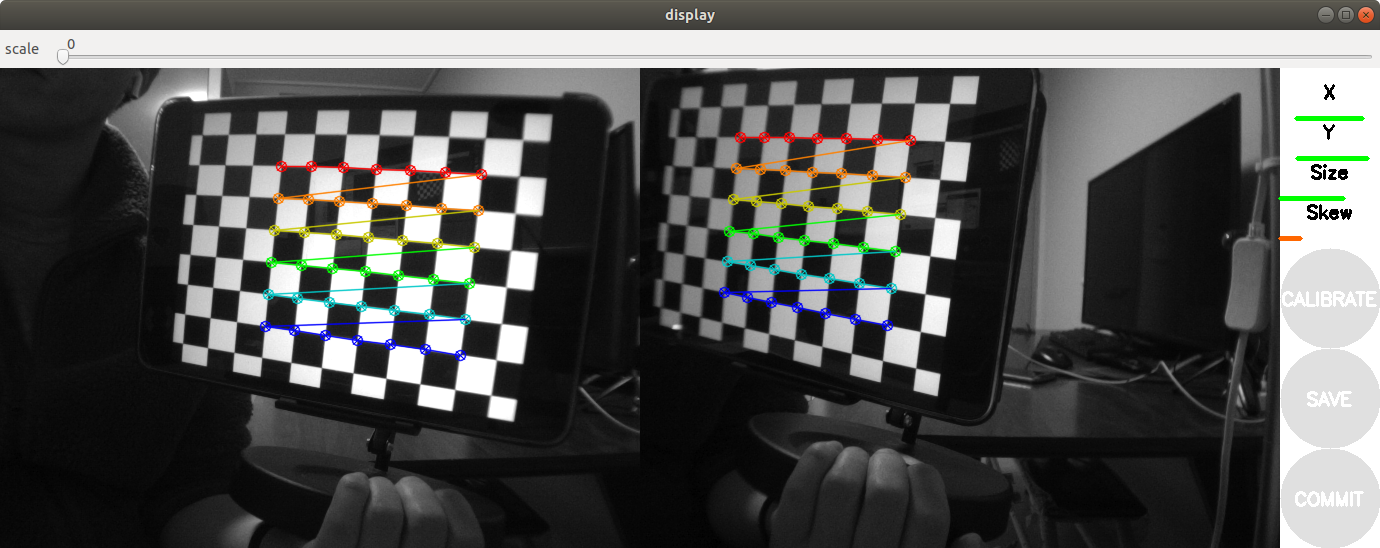
트래킹 카메라 캘리브레이션 과정
체크패턴을 움직이면서 X, Y, Size, Skew가 녹색으로 될 때까지 수행한다.
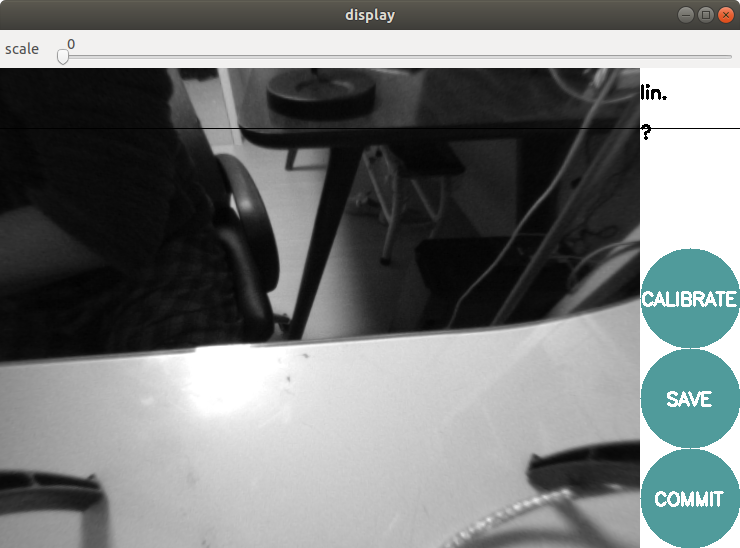
모두 녹색으로 바뀌면 Calibrate 버튼이 활성화된다. Calibrate 버튼을 누르면 아래와 같이 수행결과를 나타내준다.
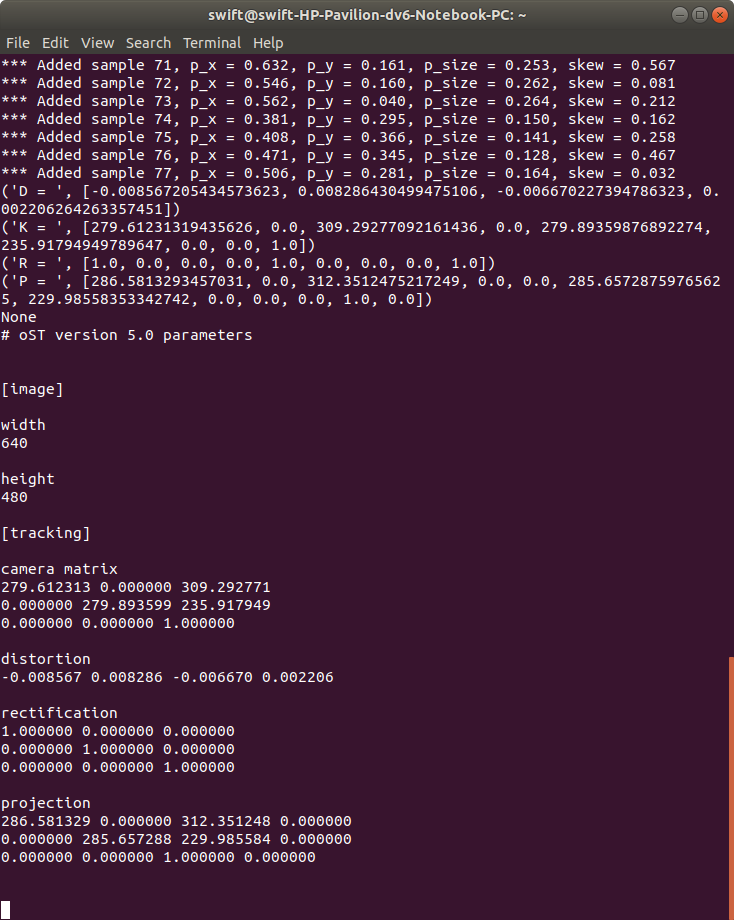
GUI에서 Save 버튼을 누르면 그 결과가 호스트 PC의 아래 경로에 저장된다.
| 'Wrote calibration data to ', '/tmp/calibrationdata.tar.gz' |
그 결과를 VOXL로 옮기려면 호스트PC에서 아래 명령어를 수행한다.
| $ ./push_tracking_cal_to_voxl.sh |
전송 결과는 VOXL로 보내어지며 아래와 같이 수행된다.

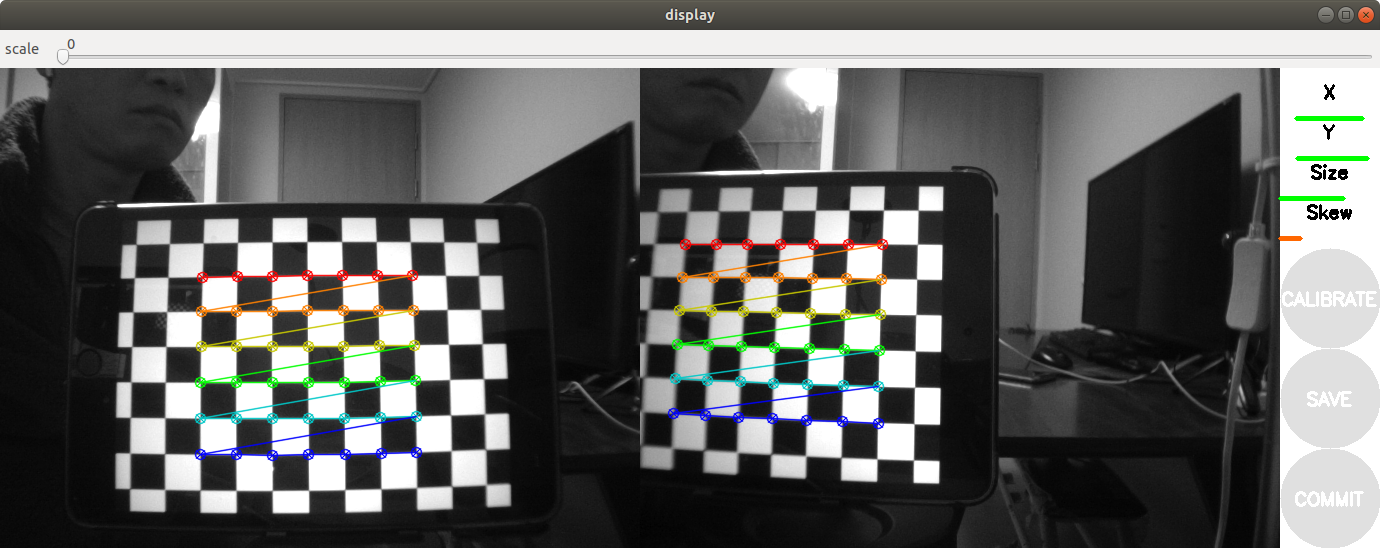
좌우 위아래 과정
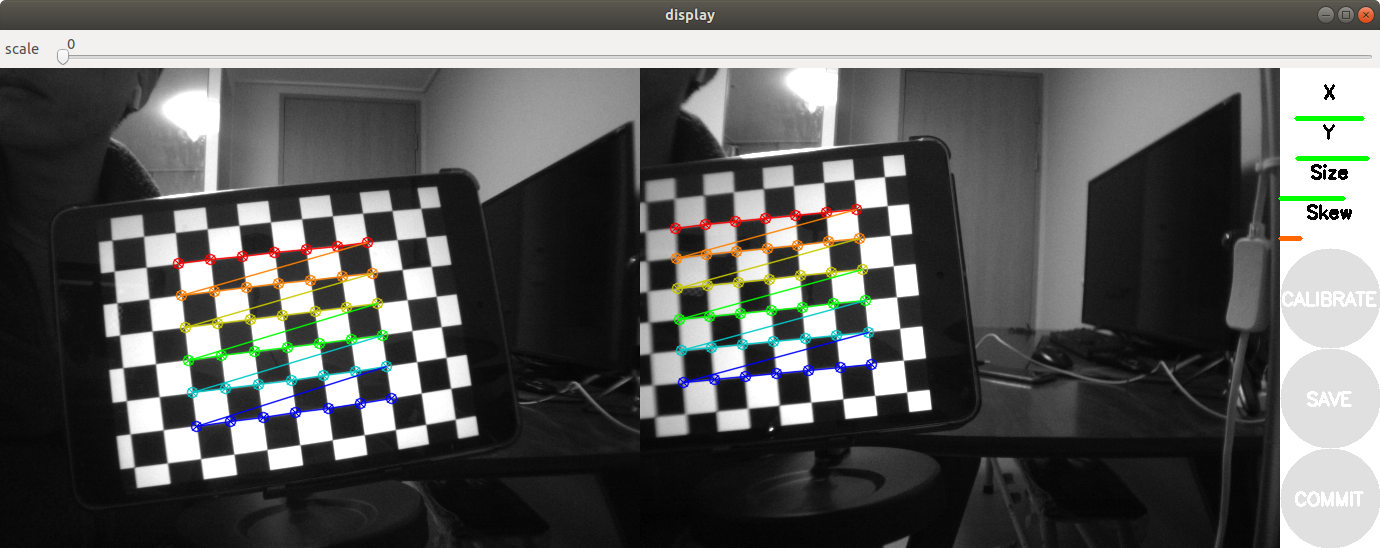
좌우 스큐 과정

스테레오 카메라의 캘리브레이션 결과이다.
| CUSTOM CALIBRATOR, with ModalAI Fisheye Patch CUSTOM CALIBRATOR, with ModalAI Fisheye Patch *** Added sample 1, p_x = 0.320, p_y = 0.252, p_size = 0.190, skew = 0.084 *** Added sample 2, p_x = 0.169, p_y = 0.175, p_size = 0.192, skew = 0.124 *** Added sample 3, p_x = 0.472, p_y = 0.301, p_size = 0.211, skew = 0.015 *** Added sample 4, p_x = 0.820, p_y = 0.472, p_size = 0.556, skew = 0.036 *** Added sample 5, p_x = 0.505, p_y = 0.552, p_size = 0.640, skew = 0.154 *** Added sample 6, p_x = 0.513, p_y = 0.510, p_size = 0.348, skew = 0.029 *** Added sample 7, p_x = 0.609, p_y = 0.878, p_size = 0.369, skew = 0.026 *** Added sample 8, p_x = 0.545, p_y = 0.616, p_size = 0.308, skew = 0.203 *** Added sample 9, p_x = 0.422, p_y = 0.578, p_size = 0.318, skew = 0.080 *** Added sample 10, p_x = 0.470, p_y = 0.695, p_size = 0.351, skew = 0.036 *** Added sample 11, p_x = 0.459, p_y = 0.222, p_size = 0.412, skew = 0.037 *** Added sample 12, p_x = 0.638, p_y = 0.576, p_size = 0.359, skew = 0.096 *** Added sample 13, p_x = 0.525, p_y = 0.400, p_size = 0.349, skew = 0.158 *** Added sample 14, p_x = 0.492, p_y = 0.276, p_size = 0.363, skew = 0.207 *** Added sample 15, p_x = 0.452, p_y = 0.380, p_size = 0.378, skew = 0.029 *** Added sample 16, p_x = 0.778, p_y = 0.349, p_size = 0.224, skew = 0.381 *** Added sample 17, p_x = 0.888, p_y = 0.292, p_size = 0.211, skew = 0.502 *** Added sample 18, p_x = 0.777, p_y = 0.321, p_size = 0.352, skew = 0.177 *** Added sample 19, p_x = 0.633, p_y = 0.236, p_size = 0.305, skew = 0.194 *** Added sample 20, p_x = 0.540, p_y = 0.233, p_size = 0.273, skew = 0.281 *** Added sample 21, p_x = 0.815, p_y = 0.854, p_size = 0.384, skew = 0.595 Stero Calibration, calculating left intrinsics 00:23:46.392537 Using instrinsic guess Stero Calibration, calculating right intrinsics 00:23:47.925835 Using instrinsic guess Stero Calibration, calculating extrinsics 00:23:49.918648 00:23:50.043990 Left: ('D = ', [-0.18831103077255, 0.09979392881997494, -0.001874558763111393, -0.003364828044223498, 0.0]) ('K = ', [496.4483869872976, 0.0, 318.13194222244135, 0.0, 496.00455632506436, 254.98228876117963, 0.0, 0.0, 1.0]) ('R = ', [0.7135620220051729, -0.006748466471476072, -0.7005595613166465, 0.012939598040397899, 0.9999099864063884, 0.0035476594155846837, 0.7004725601723752, -0.011596434152765206, 0.7135851141668375]) ('P = ', [7599.160763622445, 0.0, 1265.467307806015, 0.0, 0.0, 7599.160763622445, 232.83489227294922, 0.0, 0.0, 0.0, 1.0, 0.0]) Right: ('D = ', [-0.18074431297879, 0.09867497473634164, -0.0009884954467132986, 0.0036353564073705403, 0.0]) ('K = ', [498.7409883267622, 0.0, 291.5762187032763, 0.0, 498.30987684184066, 227.68080990553125, 0.0, 0.0, 1.0]) ('R = ', [0.7615991377315566, 0.058995280645396275, -0.645357505781191, -0.06461826976319257, 0.9977979698625183, 0.01495628801033251, 0.6448187595125938, 0.030311189349936044, 0.7637342464370913]) ('P = ', [7599.160763622445, 0.0, 1265.467307806015, -1711.1482708710546, 0.0, 7599.160763622445, 232.83489227294922, 0.0, 0.0, 0.0, 1.0, 0.0]) ('self.T ', [-0.17149381203576658, -0.01328431857227886, 0.14531899172307178]) ('self.R ', [0.9942899335632859, -0.07722967777136173, -0.07364173331778835, 0.07624005280745842, 0.9969585250967534, -0.016160247053250816, 0.07466580450669887, 0.010453521331962081, 0.997153820395394]) None # oST version 5.0 parameters [image] width 640 height 480 [stereo/left] camera matrix 496.448387 0.000000 318.131942 0.000000 496.004556 254.982289 0.000000 0.000000 1.000000 distortion -0.188311 0.099794 -0.001875 -0.003365 0.000000 rectification 0.713562 -0.006748 -0.700560 0.012940 0.999910 0.003548 0.700473 -0.011596 0.713585 projection 7599.160764 0.000000 1265.467308 0.000000 0.000000 7599.160764 232.834892 0.000000 0.000000 0.000000 1.000000 0.000000 # oST version 5.0 parameters [image] width 640 height 480 [stereo/right] camera matrix 498.740988 0.000000 291.576219 0.000000 498.309877 227.680810 0.000000 0.000000 1.000000 distortion -0.180744 0.098675 -0.000988 0.003635 0.000000 rectification 0.761599 0.058995 -0.645358 -0.064618 0.997798 0.014956 0.644819 0.030311 0.763734 projection 7599.160764 0.000000 1265.467308 -1711.148271 0.000000 7599.160764 232.834892 0.000000 0.000000 0.000000 1.000000 0.000000 |
GUI에서 Save 버튼을 누르면 그 결과가 호스트 PC의 아래 경로에 저장된다.
| 'Wrote calibration data to ', '/tmp/calibrationdata.tar.gz' |
그 결과를 VOXL로 옮기려면 호스트PC에서 아래 명령어를 수행한다.
| $ ./push_stereo_cal_to_voxl.sh |
전송 결과는 VOXL로 보내어지며 아래와 같이 수행된다.

실제로 VOXL 디바이스의 아래 경로를 확인해보면 Calibration 을 통하여 저장된 *.yaml 파일들이 저장되어 있다.
| yocto:/# cd /home/root/.ros/camera_info/ |

'엔지니어링 > 드론' 카테고리의 다른 글
| [ VOXL ] VOA(Visual Obstacle Avoidance) 의 stereo camera calibration (2) | 2021.04.04 |
|---|---|
| [ VOXL ] Vision Odometery (0) | 2021.03.26 |
| [ VOXL ] Video Streaming 확인 (0) | 2021.03.24 |
| [ VOXL ] ROS 환경설정 (0) | 2021.03.24 |
| 12/15 Ardupilot Cube Quad LOG 분석 (0) | 2020.12.15 |




댓글