카메라 서버를 실행한다.
| / # voxl-camera-server |
| / # voxl-camera-server ------ voxl-camera-server INFO: Port J2 ------ voxl-camera-server: Done configuring hires camera Port : port_J2 Name : hires Enabled : 1 Type : hires Api : hal3 P-W : 640 P-H : 480 P-Fmt : nv21 Rotation : 180 FPS : 30 OverrideId : -1 AEAlgo : isp ------ voxl-camera-server INFO: Port J3 ------ voxl-camera-server: Done configuring stereo camera Port : port_J3 Name : stereo Enabled : 1 Type : stereo Api : hal3 P-W : 1280 P-H : 480 P-Fmt : nv21 Rotation : 0 FPS : 30 OverrideId : -1 AEAlgo : mvcpa mvcpa_filter_size : 2 mvcpa_exp_cost : 0.7500 mvcpa_gain_cost : 0.2500 mvcpa_histogram : true ------ voxl-camera-server INFO: Port J4 ------ voxl-camera-server: Done configuring tracking camera Port : port_J4 Name : tracking Enabled : 1 Type : tracking Api : hal3 P-W : 640 P-H : 480 P-Fmt : raw8 Rotation : 0 FPS : 30 OverrideId : -1 AEAlgo : mvcpa mvcpa_filter_size : 2 mvcpa_exp_cost : 0.7500 mvcpa_gain_cost : 0.2500 mvcpa_histogram : true Creating pipe: /run/mpa/stereo/ channel: 1 Creating pipe: /run/mpa/tracking/ channel: 2 tracking Camera Width: 640, Height: 480, Format: 291 not supported! FASTCV: fcvAvailableHardware Linux MachineVision is licensed as community user LNX_8074 supported? 1 LNX_8096 supported? 1 LNX_IA64 supported? 1 WINDOWS supported? 0 hires stereo FASTCV: fcvAvailableHardware Linux MachineVision is licensed as community user LNX_8074 supported? 1 LNX_8096 supported? 1 LNX_IA64 supported? 1 WINDOWS supported? 0 |
새로운 터미널을 열어서 스트리밍 앱을 실행한다.
전방 고해상도 카메라를 실행할 경우 아래와 같이 입력한다.
| / # voxl-streamer -c hires-mpa |
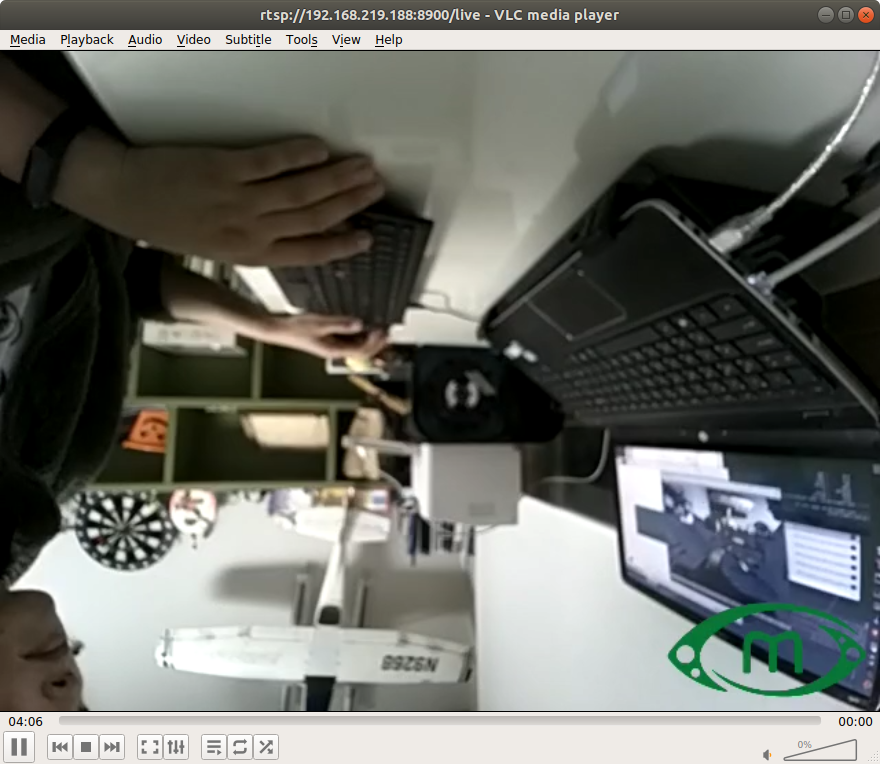
영상이 거꾸로 나오기는 하지만 VLC 플레이어로 스트리밍이 재생된다.
RTSP 프로토콜은 대부분 3-4초의 지연이 발생하는데 마찬가지로 비슷한 수준의 영상 지연이 존재한다.

| / # voxl-streamer -c hires-mpa-logo |
스테레오 카메라의 스트리밍 결과이다. 스테레오 카메라는 정상으로 나타난다.
| / # voxl-streamer -c stereo-mpa |

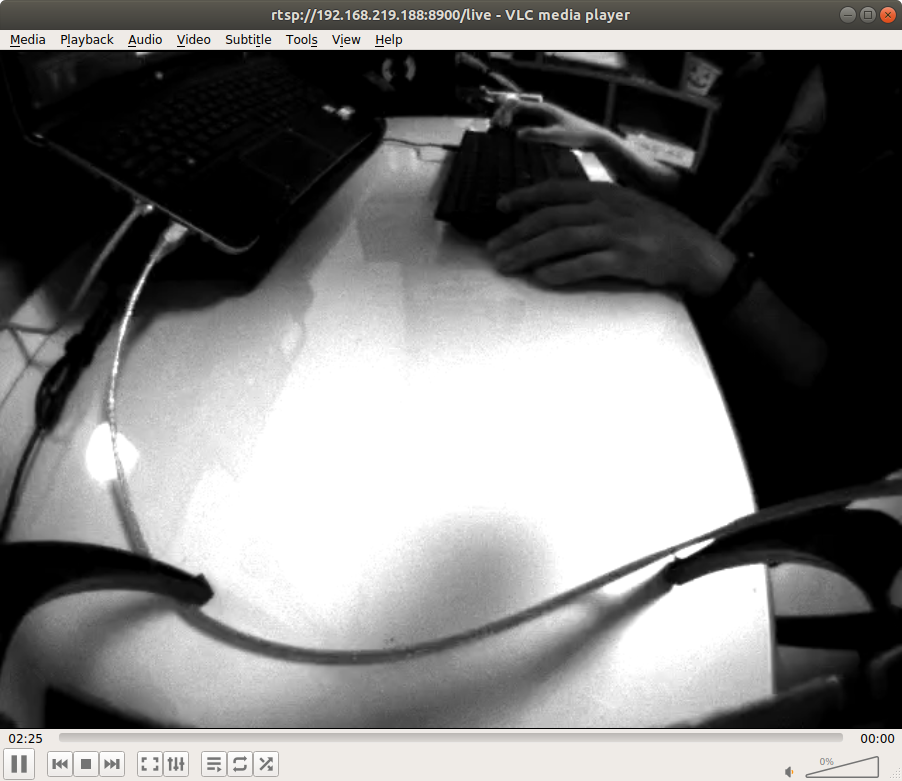
트래킹 카메라의 스트리밍 결과이다. 트래킹 카메라의 화각이 넓게 나타난다.
| / # voxl-streamer -c tracking-mpa |
728x90
'엔지니어링 > 드론' 카테고리의 다른 글
| [ VOXL ] Vision Odometery (0) | 2021.03.26 |
|---|---|
| [ VOXL ] 카메라 캘리브레이션 (0) | 2021.03.25 |
| [ VOXL ] ROS 환경설정 (0) | 2021.03.24 |
| 12/15 Ardupilot Cube Quad LOG 분석 (0) | 2020.12.15 |
| PX4 2.1 Cube의 Ardupilot 세팅 (0) | 2020.12.15 |




댓글