펌웨어는 CubeBlack, Stable 최신버전으로 펌웨어를 업로드하였다.
업로드시에는 USB 포트를 이용한다.
업로드가 완료되면 장치관리자에서 Telemetry와 연결된 COM포트를 찾아서 포트번호와 Baudrate를 57600으로 선택하여 연결한다
USB와 연결시에는 115200으로 연결된다.

초기설정에서 프레임 유형에 들어가면 상세한 프레임 타입을 선택할 수 있다.

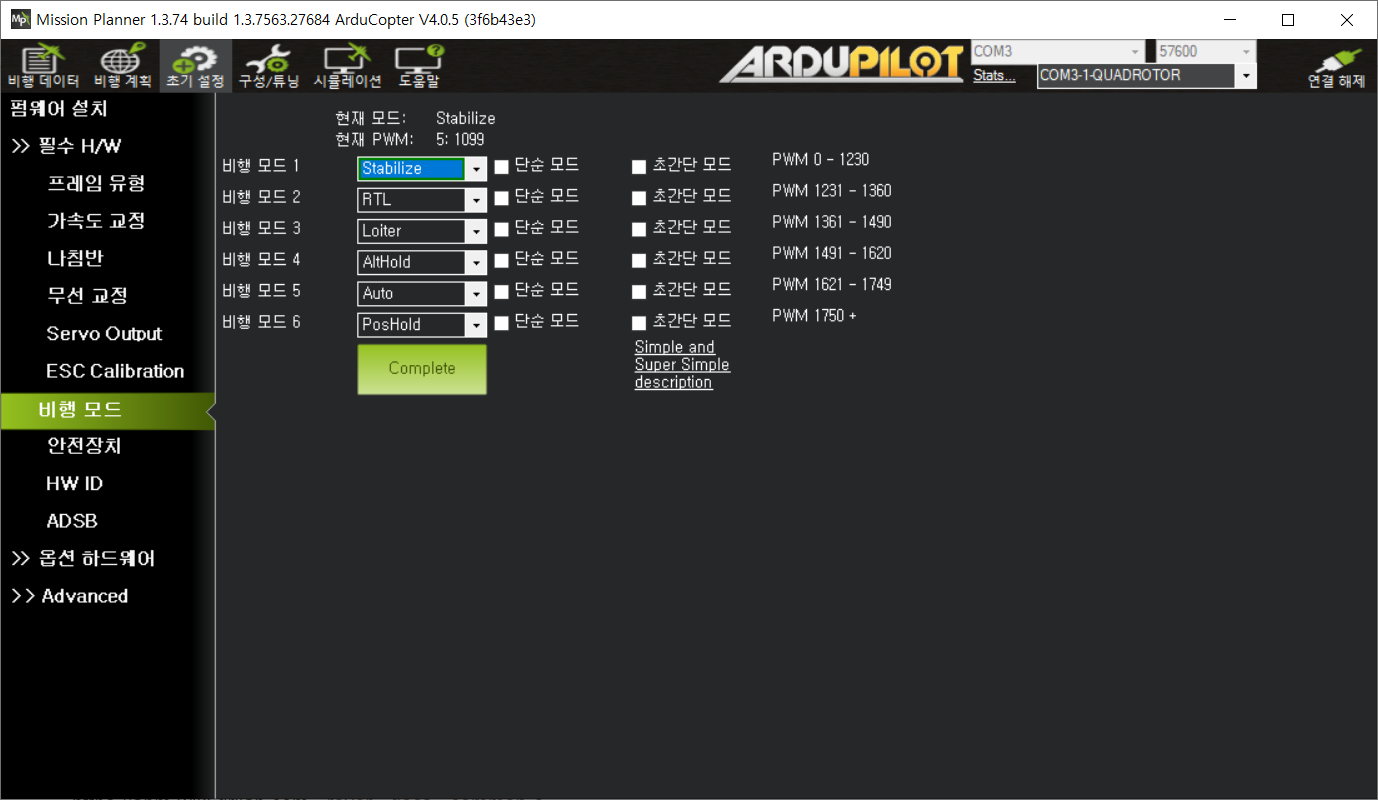
비행모드 설정
HW ID 값 확인

'엔지니어링 > 드론' 카테고리의 다른 글
| [ VOXL ] ROS 환경설정 (0) | 2021.03.24 |
|---|---|
| 12/15 Ardupilot Cube Quad LOG 분석 (0) | 2020.12.15 |
| 드론 PID 개념이해 (0) | 2020.12.11 |
| PX4 개발자] Object Avoidance 기능 관련 자료수집 (0) | 2020.11.29 |
| [PX4 개발자] Obstacle Avoidance 기능 구현 (9) | 2020.11.27 |


댓글