시험날자: 2020년 12월 15일 15-52-50
로그파일: 15-52-50.log
시험장소: 동탄 호수공원 잔디구장
시험방법 : Waypoint 비행
Waypoint 경로: Takeoff(고도 30m) -> WP1(수평 40m 이동) -> WP2(반대방향으로 수평 40m 이동) -> Landing

Auto Mission수행에서 EKF2 항목 분석(Compass variance, Velocity variance)

Auto Mission수행에서 X축 지자계 센서 출력
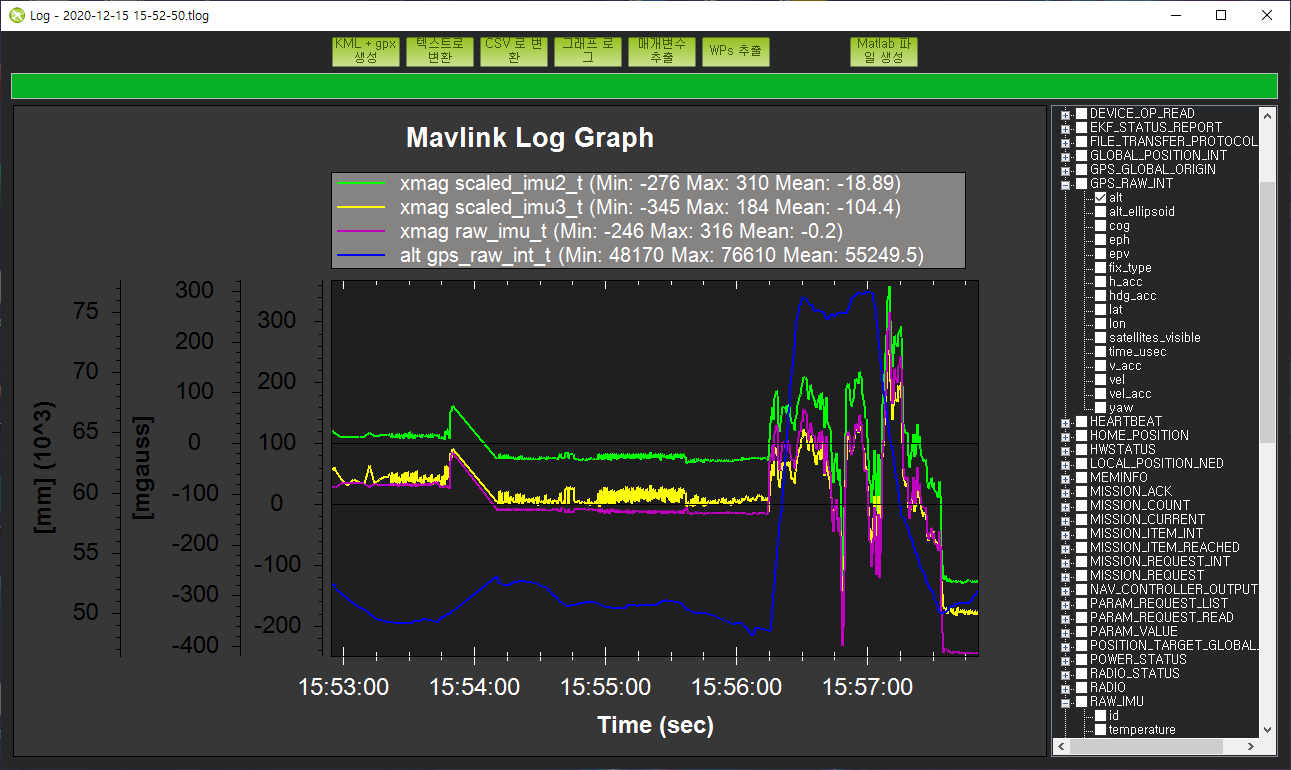
지자계 X축에서는 IMU3 값의 오차범위가 상대적으로 높은편임
Raw IMU가 가장 좋음
Auto Mission수행에서 Y축 지자계 센서 출력

지자계 X축에서는 IMU3 값의 오차범위가 상대적으로 약간 높지만 대부분 비슷함
Raw IMU가 가장 좋음
Auto Mission수행에서 Z축 지자계 센서 출력
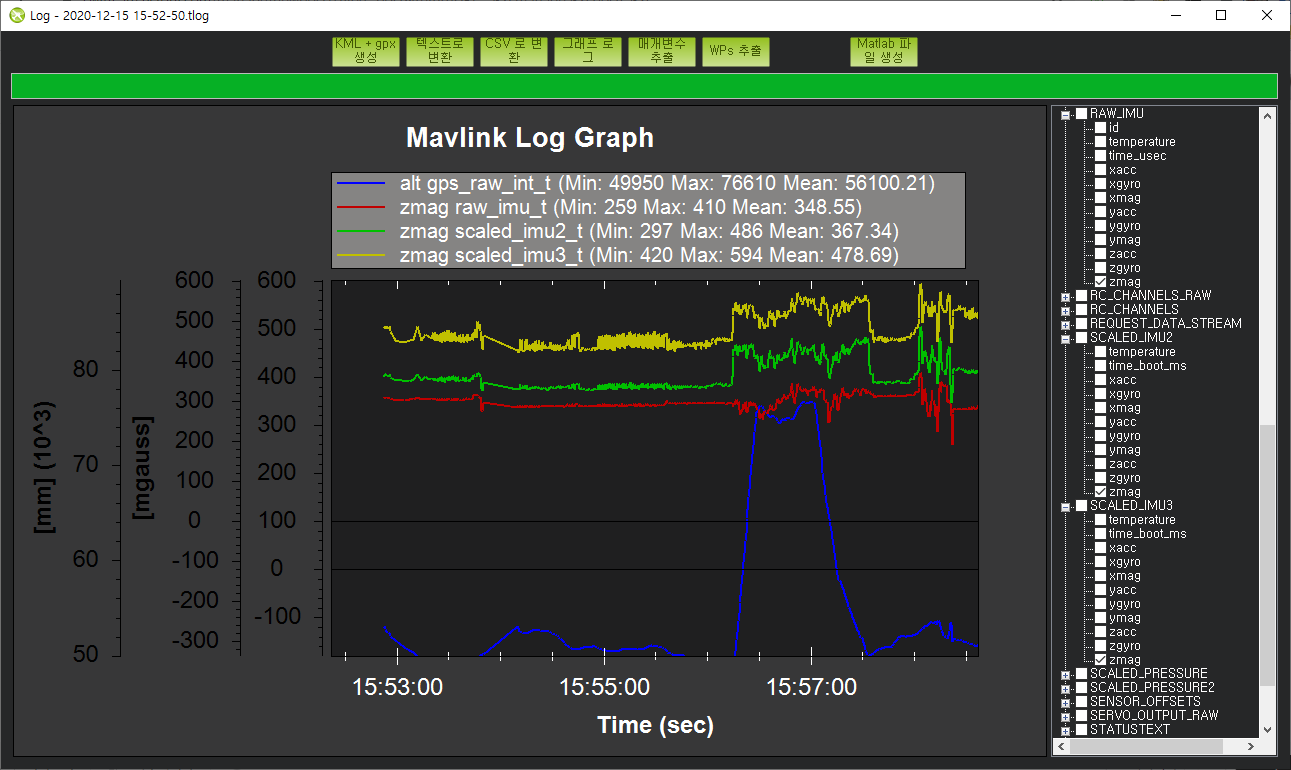
지자계 X축에서는 IMU3 값의 오차범위가 상대적으로 높은편임
Raw IMU가 가장 좋음
Auto Mission수행에서 가속도센서 X축 출력
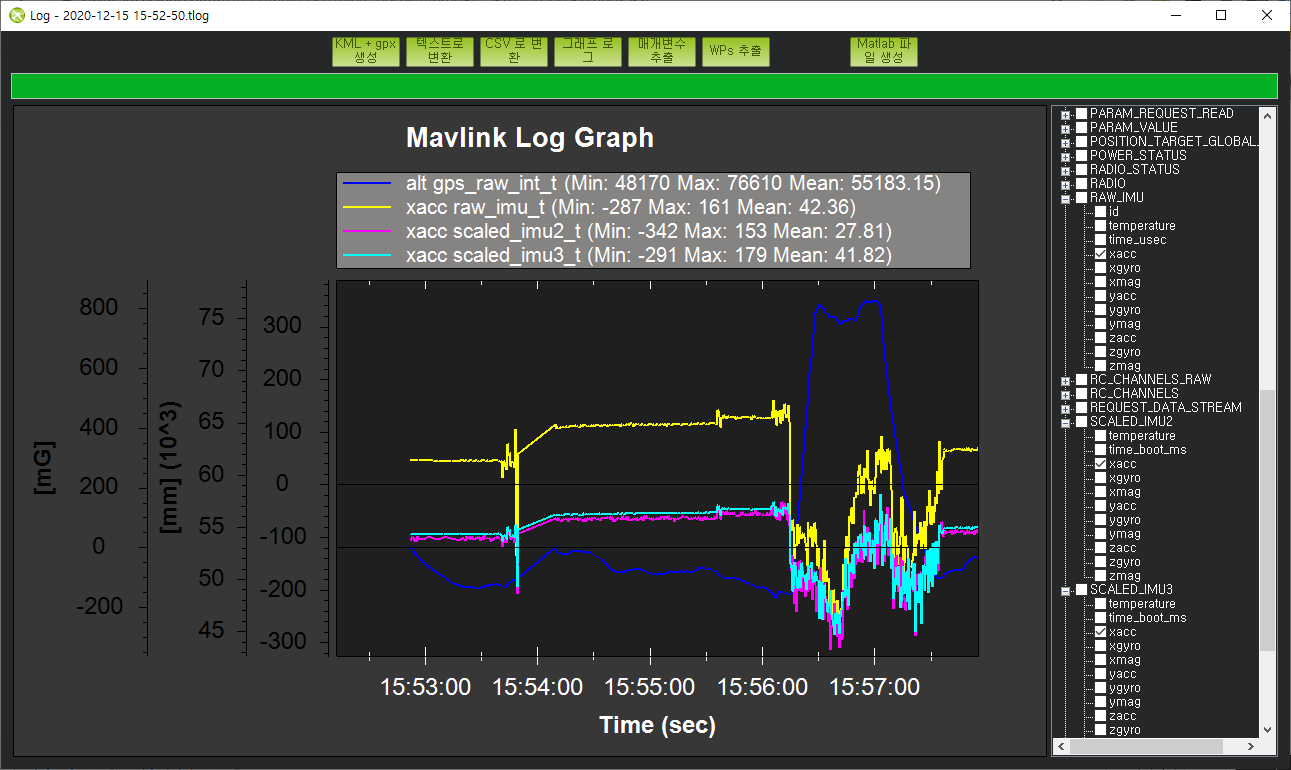
가속도 X축 출력은 IMU2가 상대적으로 약간 오차가 있으나 대부분 비슷한 수준임
Auto Mission수행에서 가속도센서 Y축 출력

가속도 Y축 출력은 IMU2가 상대적으로 약간 오차가 있으나 대부분 비슷한 수준임
Auto Mission수행에서 가속도센서 Z축 출력
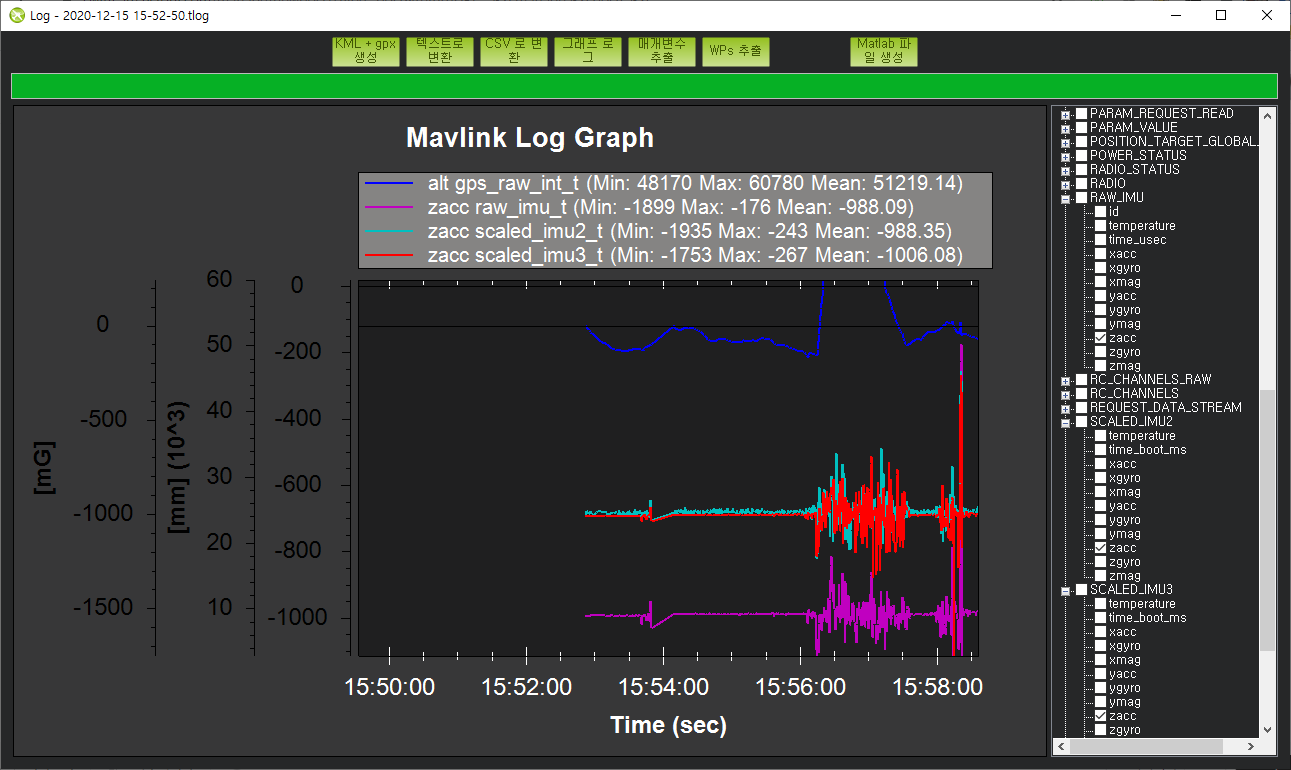
가속도 Y축 출력은 IMU2가 상대적으로 약간 오차가 있으나 대부분 비슷한 수준임
Auto Mission수행에서 자이로센서 X축 출력
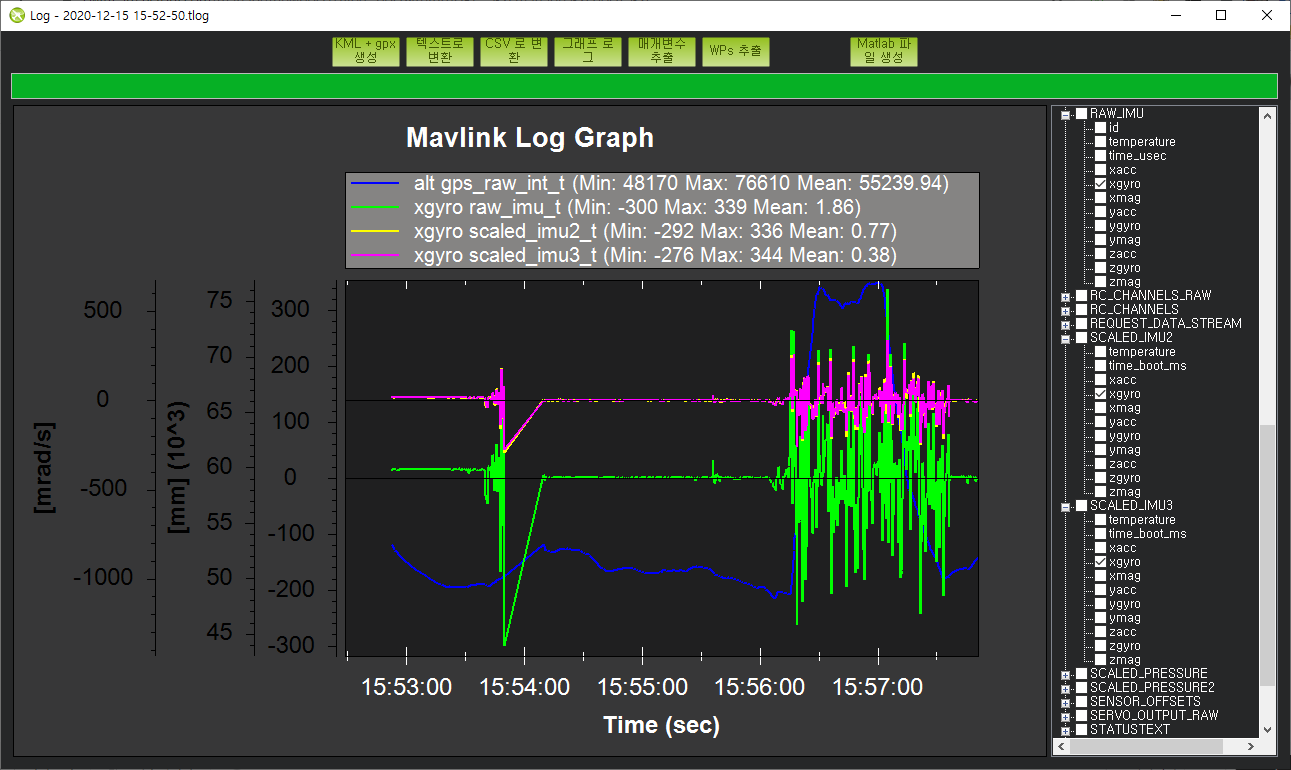
자이로 출력은 스케일된 값 외에는 3개가 거의 비슷함
Auto Mission수행에서 자이로센서 Y축 출력

자이로 출력은 스케일된 값 외에는 3개가 거의 비슷함
Auto Mission수행에서 자이로센서 Z축 출력

자이로 출력은 스케일된 값 외에는 3개가 거의 비슷함
'엔지니어링 > 드론' 카테고리의 다른 글
| [ VOXL ] Video Streaming 확인 (0) | 2021.03.24 |
|---|---|
| [ VOXL ] ROS 환경설정 (0) | 2021.03.24 |
| PX4 2.1 Cube의 Ardupilot 세팅 (0) | 2020.12.15 |
| 드론 PID 개념이해 (0) | 2020.12.11 |
| PX4 개발자] Object Avoidance 기능 관련 자료수집 (0) | 2020.11.29 |



댓글